 FB_PWDutyOutput
FB_PWDutyOutput
Description
The Pulse![]() When the step gets activated, the action is activated for a single execution, and possibly once again when the step is deactivated Width Duty Cycle function block accepts an input value between the minimum and maximum input range and converts this to a duty cycle percentage. The output is then cycled on and off over the period of the duty cycle at the duty cycle percentage.
When the step gets activated, the action is activated for a single execution, and possibly once again when the step is deactivated Width Duty Cycle function block accepts an input value between the minimum and maximum input range and converts this to a duty cycle percentage. The output is then cycled on and off over the period of the duty cycle at the duty cycle percentage.
- If it is desired to have the output ON time range from 0 to the duty cycle period, the minimum should be set to zero and the maximum to the duty cycle period.
- If the calculated duty cycle based on the input and range values is less than the minimum ON time (MinTime), the output will not come on.
- If the calculated duty cycle is between or equal to the range values the output is cycled by the duty cycle.
- If the calculated duty cycle is greater than the maximum ON time (MaxTime) the output will remain on.
The following figure shows the function block I/O
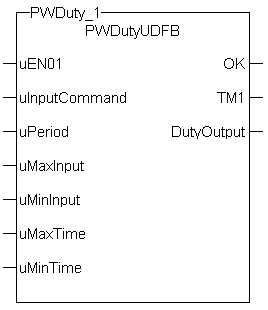
Figure 7-226: Pulse Width Duty Cycle
Arguments
Input
| uEN01 | Description | Enable for the block |
| Data type | BOOL | |
| Range | [0 , 1] | |
| Unit | N/A | |
| Default | — | |
| uInputCommand | Description | Signal Input (sometimes the output of a PID |
| Data type | REAL | |
| Range | [0 to -- ] | |
| Unit | N/A | |
| Default | — | |
| uPeriod | Description | Period of the duty cycle |
| Data type |
TIME |
|
| Range | [0 , -- ] | |
| Unit | N/A | |
| Default | — | |
| uMaxInput | Description | uInputCommand at or above this number that sets DutyOutput =1 |
| Data type | REAL | |
| Range | uMinInput to -- | |
| Unit | N/A | |
| Default | — | |
| uMinInput | Description | uInputCommand at or below this number set DutyOutput = 0 |
| Data type | REAL | |
| Range | 0 to uMaxInput | |
| Unit | N/A | |
| Default | — | |
| uMaxTime | Description | Maximum on time for the Output |
| Data type |
TIME |
|
| Range | uMinTime to uPeriod | |
| Unit | N/A | |
| Default | — | |
| uMinTime | Description | Minimum on-time for the PW Duty Output |
| Data type |
TIME |
|
| Range | 0 to uMaxTime | |
| Unit | N/A | |
| Default | — |
Output
| OK | Description |
Fucnction block is OK. |
| Data type | BOOL | |
| Range | [0 , 1] | |
| TM1 | Description | On-time of the Output |
| Data type |
TIME |
|
| Range | 0 to uPeriod | |
| DutyOutput | Description | PW signal ( switching between 0 and 1). DutyOutput is set to 0 when the function block is not active (not eabled by the first input). |
| Data type | BOOL | |
| Range | [0 , 1] |
Usage
Flash a warning light for operators.
Related Functions
Example
Function Block Calculations
IF (uInputCommand - uMinInput) < 0 then //If Command less than MinInput turn out put off
DutyOutput := 0;
ELSIF (uInputCommand - uMaxInput) > 0 then //If Command greater than MaxInput turn out put on
DutyOutput := 1;
ELSE
DutyCycle := (uInputCommand - uMinInput)/(uMaxInput - uMinInput); //Calculate Duty Cycle
ONTimeFromInput := DutyCycle * any_to_REAL(uPeriod) ; //Calculate Ontime
IF any_to_TIME(ONTimeFromInput) < uMinTime then
DutyOutput := 0;
ELSIF any_to_TIME(ONTimeFromInput) > uMaxTime then
DutyOutput := 1;
ELSE
TM1 := any_to_TIME(ONTimeFromInput) ;
TM0 := uPERIOD - TM1; //Calculate offtime
DutyOutput := Inst_blinkA( 1 , TM0 , TM1 ); //Use BlinkA function to set PW output
END_IF ;
END_IF ;
Structured Text
|
Inst_FB_PWDutyOutput( PWDuty_3_Switch, PWDuty_In3, PWDuty_3_Period, PWDuty_3_MaxInput, PWDuty_3_MinInput, PWDuty_3_MaxTime, PWDuty_3_MinTime); PWDuty_3_OK:=Inst_FB_PWDutyOutput.OK; PWDuty_3_Time:=Inst_FB_PWDutyOutput.TM1; PWDuty_3_Output:=Inst_FB_PWDutyOutput.DutyOutput;
|
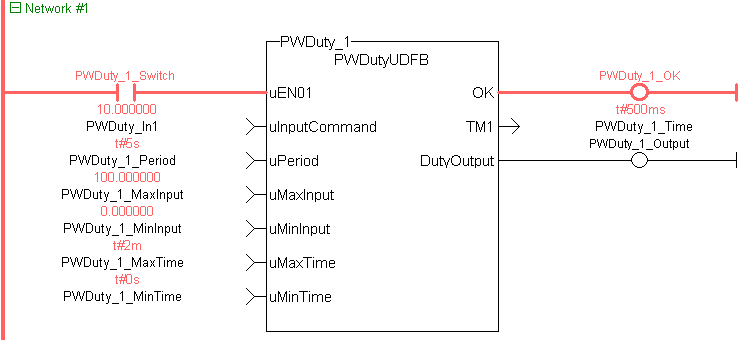
Ladder Diagram
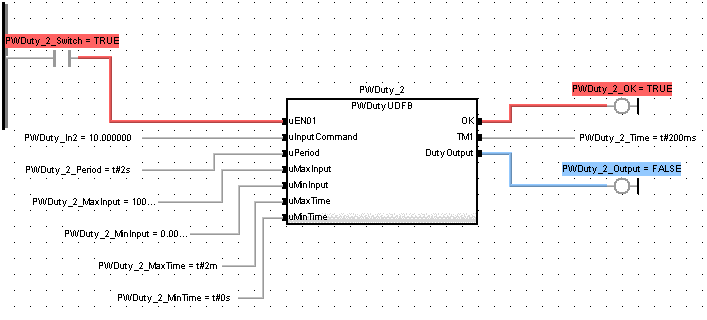
Function Block Diagram
 [Top]
[Top]





