 MC_InitAxis
MC_InitAxis
Description
![]() A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML Axis' data. A call to this function is automatically generated when the application is compiled, based on the data entered in the PLCopen Axis Data dialog.
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML Axis' data. A call to this function is automatically generated when the application is compiled, based on the data entered in the PLCopen Axis Data dialog.
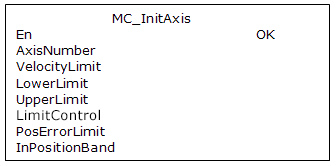
Arguments
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
Input
|
En |
Description |
Request to initialize a PLCopen axis |
|
Data type |
BOOL |
|
|
Range |
0, 1 |
|
|
Unit |
N/A |
|
|
Default |
— |
|
|
AxisNumber |
Description |
Axis number |
|
Data type |
UINT |
|
|
Range |
[1,256] |
|
|
Unit |
none |
|
|
Default |
— |
|
|
VelocityLimit |
Description |
Reserved for future use |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit/sec |
|
|
Default |
— |
|
|
LowerLimit |
Description |
Reserved for future use |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit |
|
|
Default |
— |
|
|
UpperLimit |
Description |
Reserved for future use |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit |
|
|
Default |
— |
|
|
LimitControl |
Description |
Reserved for future use |
|
Data type |
UINT |
|
|
Range |
[0,2] |
|
|
Unit |
N/A |
|
|
Default |
— |
|
|
PosErrorLimit |
Description |
Position error limit – when the Position Error (command position – actual position) exceeds this value, an E-stop is generated |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit |
|
|
Default |
— |
|
|
InPositionBand |
Description |
In-position bandwidth |
|
Data type |
LREAL |
|
|
Range |
— |
|
|
Unit |
User unit |
|
|
Default |
— |
Output
|
OK |
Description |
Indicates the initialization is complete See more details here. |
|
Data type |
BOOL |
Example
Structured Text
(* MC_InitAxis ST"Structured text" A high-level language that is block structured and syntactically resembles Pascal example *)
AxisNumber1 := 1;
VelocityLimit1 := 10000; (*User unit/second*)
LowerPosLimit1 := 0;
UpperPosLimit1 := 0;
LimitControl1 := 0; (* Ignore lower and upper pos limit*)
PosErrorLimit1 := 10; (*User unit*)
InPosBand1 := 0;
MC_InitAxis(AxisNumber1, VelocityLimit1, LowerPosLimit1, UpperPosLimit1, LimitControl1, PosErrorLimit1, InPosBand1);
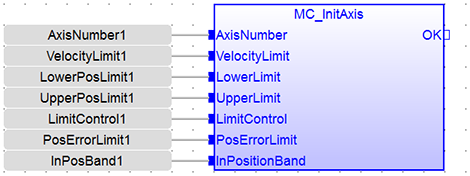
Function Block Diagram
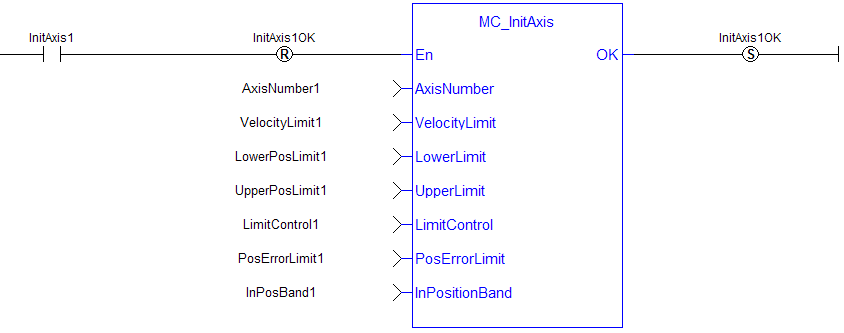
Ladder Diagram
 [Top]
[Top]





