 MLMotionInit
MLMotionInit

Description
Initializes the motion library. Must be called before any other Motion Library function. Returns TRUE if the function succeeded.
-
-
The BasePeriod argument establishes the base cycle time (in microseconds) for the Motion Engine when running simulations without the EtherCAT
 ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Motion Bus. When the EtherCAT Motion Bus is present, the EtherCAT cycle time overrides the BasePeriod argument (the cycle time is defined in the EtherCAT Master Settings Tab tab). The EtherCAT cycle time then becomes the base cycle time for the Motion Engine.
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Motion Bus. When the EtherCAT Motion Bus is present, the EtherCAT cycle time overrides the BasePeriod argument (the cycle time is defined in the EtherCAT Master Settings Tab tab). The EtherCAT cycle time then becomes the base cycle time for the Motion Engine.
Parameter
BasePeriod : LREAL (input)
Return Type
BOOL
Example
ST
//Initialization code to start EtherCAT network.
//First initialize network with MLMotionInit command
//Then wait for command to finish by monitoring MLMotionStatus output
//Once initialized, create any cam profiles and PLCopen
//Then call MLMotionStart and monitor MLMotionStatus again before beginning rest of program
FirstCycle := TRUE;
On FirstCycle DO //Initialize the motion engine
MLMotionInit( 1000);
END_DO;
MotionEngineStatus := MLMotionStatus();//Check the current status of the motion engine
//Once motion engine is initialized, create CAM profiles and defined Axis, then start the motion engine
ON MotionEngineStatus = MLSTATUS_INITIALISED DO
Profiles( MLPR_CREATE_PROFILES );
PLCopen( 0 );
MLMotionStart();
END_DO;
IF MotionEngineStatus = MLSTATUS_RUNNING THEN
bMotionEngineStarted := TRUE;
ELSE
bMotionEngineStarted := FALSE;
END_IF;
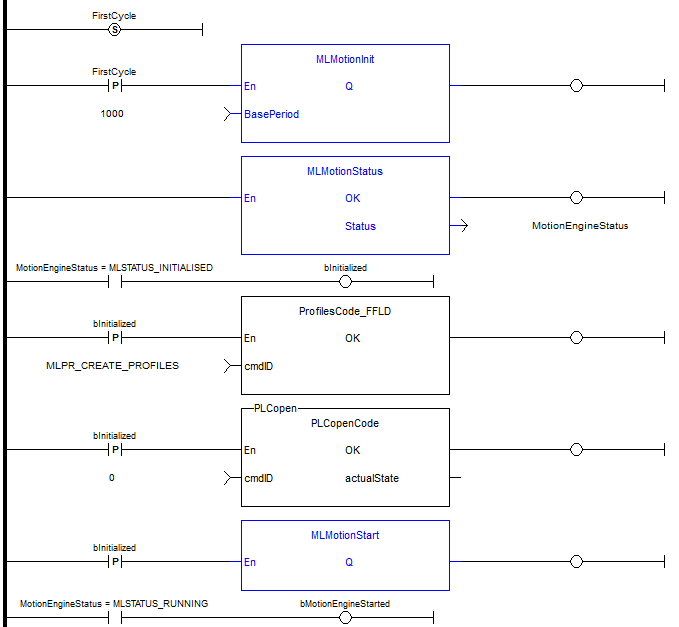
FBD

FFLD
 [Top]
[Top]





