Motion Control Main Functions
![]() Motion control is a sub-field of automation, in which the position and/or velocity of machines are controlled using some type of device such as a hydraulic pump, linear actuator, or an electric motor, generally a servo. Motion control is an important part of robotics and CNC machine tools; however, it is more complex than in the use of specialized machines, where the kinematics is usually simpler. The latter is often called General Motion Control (GMC). Motion control is widely used in the packaging, printing, textile and assembly industries consists of the two following main parts:
Motion control is a sub-field of automation, in which the position and/or velocity of machines are controlled using some type of device such as a hydraulic pump, linear actuator, or an electric motor, generally a servo. Motion control is an important part of robotics and CNC machine tools; however, it is more complex than in the use of specialized machines, where the kinematics is usually simpler. The latter is often called General Motion Control (GMC). Motion control is widely used in the packaging, printing, textile and assembly industries consists of the two following main parts:
- Setpoint
 Setpoint is the target value that an automatic control system, for example PID controller, will aim to reach generation
Setpoint is the target value that an automatic control system, for example PID controller, will aim to reach generation - Regulation
Setpoint generation
This consists of generating a trajectory defined by position versus time. It is purely logical and does not relate to the physical world.
Even using the very best drives, you cannot maintain accurate positioning without a feedback loop. The regulation consists of following the generated position settings using classical feed-forward![]() This describes an element or pathway within a control system which passes a controlling signal from a source in the control system's external environment, often a command signal from an external operator, to a load elsewhere in its external environment or feedback control-loops (by means of PID
This describes an element or pathway within a control system which passes a controlling signal from a source in the control system's external environment, often a command signal from an external operator, to a load elsewhere in its external environment or feedback control-loops (by means of PID![]() "Proportional-Integral-Derivative"
A PID controller is a generic control-loop feedback mechanism widely used in industrial control systems.
An "error" occurs when an event or a disturbance triggers off a change in the process variable.
A PID controller attempts to correct the error between a measured process variable and a desired setpoint by calculating and then outputting a corrective action that can adjust the process accordingly). Regulation is the part which takes care of the physical world of making moving motors.
"Proportional-Integral-Derivative"
A PID controller is a generic control-loop feedback mechanism widely used in industrial control systems.
An "error" occurs when an event or a disturbance triggers off a change in the process variable.
A PID controller attempts to correct the error between a measured process variable and a desired setpoint by calculating and then outputting a corrective action that can adjust the process accordingly). Regulation is the part which takes care of the physical world of making moving motors.
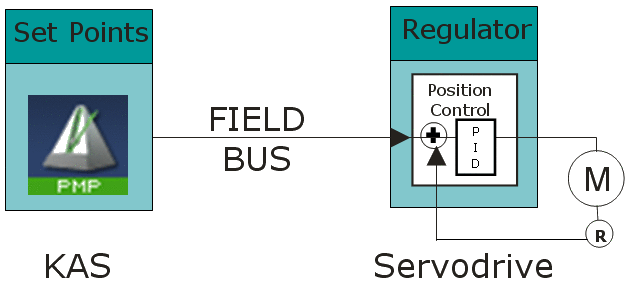
These two functions can be located on the same hardware (as in a "stand-alone" servo drive![]() A servo drive is a special electric amplifier used to power electric servo motors. It monitors feedback signals from the motor and continually adjusts for deviation from expected behavior) or on two separate hardware devices, linked together by a fieldbus.
A servo drive is a special electric amplifier used to power electric servo motors. It monitors feedback signals from the motor and continually adjusts for deviation from expected behavior) or on two separate hardware devices, linked together by a fieldbus.