Distributed Clock tab
The contents of this tab allow you to change settings related to the Distributed Clock for all Kollmorgen and third-party devices (both discovered and manually added).
| Element | Description |
|---|---|
| Distributed Clock Profile |
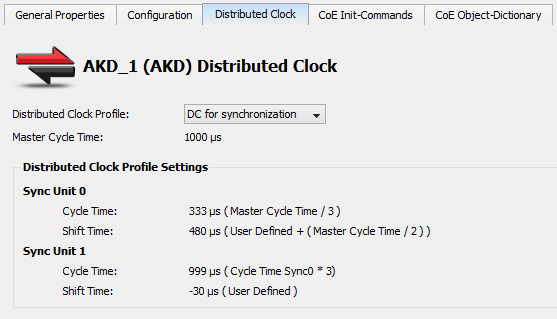
Select the Distributed Clock (DC) operation mode. These modes cannot be edited. FreeRun DC-Synchron, DC for synchronization, DC-Synchronous: Device cyclic operation is triggered by the local distributed clock. Devices are synchronized by the reference clock. DC-Synchron (input based): as DC-Synchron mode, with the cyclic start time chosen such that it coincides with other input slaves in the EtherCAT system. |
| Master Cycle Time | Base interval in microseconds, which will be used by the master. This is changed and automatically updated by changing the Cycle Time value on the EtherCAT Master Settings Tab tab. |
| Sync Unit 0 |
Cycle Time:
Shift Time:
|
| Sync Unit 1 |
Cycle Time:
Shift Time:
|
-
-
Some or none of the content will be available under the following scenarios:
- The Sync 0 or Sync 1 parameter is not present
- Distributed Clock is not supported by the device
- The ESI file is missing.
Oversampling devices
Some EtherCAT devices have oversampling features. An oversampling device is typically able to record (input) or provide (output) signals at a higher rate than the EtherCAT cycle time. This rate is called the oversampling factor. For example, with an oversampling factor of 10 and an EtherCAT cycle time of 1ms (1Khz), an input device can record values every 100µs (1000 divided by 10).
Oversampling devices have as many PDO![]() PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. objects in their cyclic frames as the oversampling factor in order to achieve the higher rate. Each of these PDO objects corresponds to one sample. For example, an output device with an oversampling factor of 4 will typically have 4 PDO objects: Output 1, Output 2, Output 3 and Output 4.
PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. objects in their cyclic frames as the oversampling factor in order to achieve the higher rate. Each of these PDO objects corresponds to one sample. For example, an output device with an oversampling factor of 4 will typically have 4 PDO objects: Output 1, Output 2, Output 3 and Output 4.
The oversampling factor is tied to the Distributed Clock Profile. A warning is displayed next to the DC profile selection box in the Distributed Clocks tab when a device has oversampling features, as seen below.
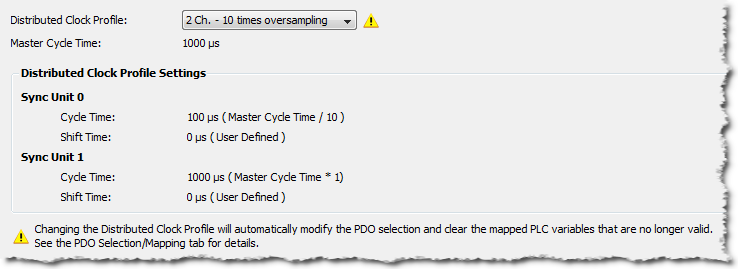
Figure 4-117: Example of a device with oversampling.
Changing the Distributed Clock Profile will automatically change the PDO selection. All PDOs corresponding to the selected Distributed Clock Profile and its according oversampling factor will be selected. These maps will be discarded if one or several PLC![]() "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events variables were mapped to a PDO that is no longer selected.
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events variables were mapped to a PDO that is no longer selected.






