 Axis Settings
Axis Settings
The Settings view allows you to configure the axis command source and operation modes. This section can be reached by first selecting an Axis under your device, and then selecting Settings in the lower navigation pane.
By default, only settings applicable to your current axis operation mode and command source will appear in the navigation tree. To show all settings available for the device (even if the these settings are not used with the current operation mode and command source), right click on Settings and select Show all Settings.
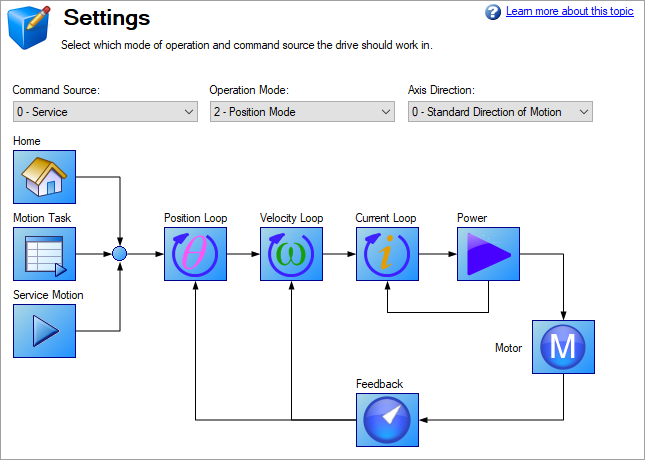
Settings View
From the main Settingsview, you can configure the following drive settings:
|
Element |
Description |
Parameter |
|---|---|---|
|
Command Source |
Selects where the command is being provided:
|
AXIS#.CMDSOURCE |
|
Operation Mode |
Selects the servo loops that are used in the drive.
|
AXIS#.OPMODE |
| Axis Direction | Sets the direction of the motor. The drive must be disengaged to change this.
|
AXIS#.DIR |






