 Velocity Loop
Velocity Loop
Overview
The velocity loop is active when the drive operates in velocity mode (AXIS#.OPMODE = 1) or position mode (
Tabs in the Velocity Loop View
The velocity view includes an active block diagram. If you click on a block in the diagram, the appropriate tab opens below.
- Velocity clamp. The velocity clamp affects the maximum speed of the drive when the command source is service (AXIS#.CMDSOURCE ). This speed limit affects motion commanded in service motion and in motion tasks. These limits are also found in the limit screen on WorkBench. (AXIS#.VL.LIMITP and AXIS#.VL.LIMITN )
- AR Filter: AR1, AR2, AR3, and AR4 are the independent bilinear quadratic (bi-quad) filters inside the drive. AR1 and AR2 are in the forward path and AR3 and AR4 are in the feedback path. These bi-quad filters can each be configured in five different modes.
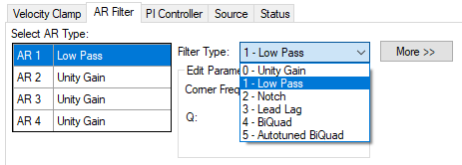
- 0–Unity Gain. The filter is off, and it will not affect the loop.
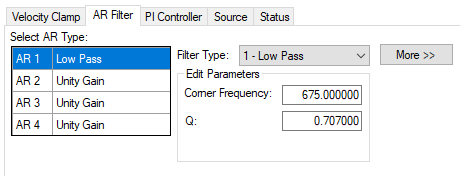
- 1–Low Pass. In modes 1, 2, and 3, the bi-quad filter is configured for each respective type of filtering. The Edit Parameters field is used to set up the filter. The actual bi-quad filter values are shown to the left:
- 2–Notch
- 3–Lead Lag
- 4–Bi-quad . A manually configured Bi-quad filter. This is an advanced tuning function.
- 5–Autotuned Biquad . When the PST sets a filter after the PST process is complete, the values are input into the Bi-Quad filter and are shown as read only values.
- PI Controller: Set the Proportional and Integral Gain values. For more information see Tuning Guide.
- Observer: This tab contains parameters which are relevant to the status of an Observer.
- Observer Enabled: This option turns the Observer on and off. When the Observer is in the disabled state (0), it passes the raw velocity feedback into the control loops. Associated command: AXISx.OBS.ENABLE
- Observer Gain: This field sets the model gain of the velocity Observer. This value represents the gain of the electro-mechanical plant of the system. The system has a high gain if it responds quickly and agilely, and this number will be high. For a heavily loaded system with a large inertia mismatch, the system does not respond quickly and is sluggish. This means the value of this optin will be lower. AXISx.OBS.KO
- Observer Bandwidth
 In computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz: This field sets the bandwidthIn computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz of the observer in Hz. The observer passes the velocity feedback through a PID"Proportional-Integral-Derivative"
A PID controller is a generic control-loop feedback mechanism widely used in industrial control systems.
An "error" occurs when an event or a disturbance triggers off a change in the process variable.
A PID controller attempts to correct the error between a measured process variable and a desired setpoint by calculating and then outputting a corrective action that can adjust the process accordingly control loop that behaves like a low-pass filter with a bandwidth of this value. AXISx.OBS.BW
In computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz: This field sets the bandwidthIn computer networking, bandwidth often refers to a data rate measured in bits/s, for example, network throughput. The reason for the connection of data rate with the term bandwidth is that the limit to the data rate of a physical communication link is related to its bandwidth in hertz of the observer in Hz. The observer passes the velocity feedback through a PID"Proportional-Integral-Derivative"
A PID controller is a generic control-loop feedback mechanism widely used in industrial control systems.
An "error" occurs when an event or a disturbance triggers off a change in the process variable.
A PID controller attempts to correct the error between a measured process variable and a desired setpoint by calculating and then outputting a corrective action that can adjust the process accordingly control loop that behaves like a low-pass filter with a bandwidth of this value. AXISx.OBS.BW
- Source: Select the source for the Velocity Loop Feedback. Selections include "Same as commutation" or one of the Feedbacks.
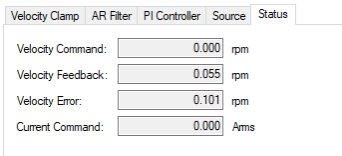
- Status. The status tab shows parameters that are relevant to the velocity loop performance.
Velocity Loop Default Settings and Changes
By default, a PI loop with a low-pass filter (AR1) is set in the drive.
The default value for the low-pass filter is 675Hz. The low-pass filter is important for disturbance rejection, and it also reduces the audible noise of the system.
Velocity Loop Changes Based on Slider Tuning
Slider tuning (see Slider Tuning) uses the slider control to adjust the proportional gain and integral gain values of the velocity loop based on the desired bandwidth. If you adjust the bandwidth using the slider tuner and then return to the velocity loop screen, you will see different values inside the proportional gain and integral gain fields. No adjustment is made to the filters automatically by using the slider tuner. Only the proportional and integral terms are adjusted.
Biquad Filters
Filters in the drive all exist as digital biquad filters in the servo loops. Lowpass, LeadLag, and Resonator filters are derived by the following equations. WorkBench handles all the math involved for the user. Enter the values in the fields for the type of filter desired.
Generate a Biquad as a Lowpass at Frequency F
Numerator Frequency = 5000
Numerator Q = Sqrt(2)/2 (this is 0.707)
Denominator Frequency = F
Denominator Q = Sqrt(2)/2 (this is 0.707)
Generate a Biquad as a LeadLag at Frequency F, Gain G
Numerator Frequency = F * 10^(-G/80)
Numerator Q = Sqrt(2)/2 (this is 0.707)
Denominator Frequency = F * 10^(G/80)
Denominator Q = Sqrt(2)/2 (this is 0.707)
Generate a Biquad as a Resonator at Frequency F, Gain G, Bandwidth Q
Numerator Frequency = F
Numerator Q = 10^(-G/40) * Q
Denominator Frequency = F
Denominator Q = 10^(G/40) * Q
Related Parameters
VL Parameters | AXIS#.CMDSOURCE | AXIS#.OPMODE
Related Topics
Limits | Service Motion | Tuning Your System | Motion Tasks






