AKD2G Support With MC_TouchProbe
Following are several tips related to using MC_TouchProbe with AKD2G drives.
-
- Currently, AKD2G only supports position capture.
- AKD2G does not use CAP1 or CAP2 to provide the EtherCAT
 ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs touch probes. AKD2G supports ETG6010 and DS402 for Touch Probe objects
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs touch probes. AKD2G supports ETG6010 and DS402 for Touch Probe objectsTwo touch probes per axis are supported over EtherCAT with their own dedicated hardware in the drive. Each touch probe can capture two positions, the position on the rising and the position of the falling edge of the trigger input.
Following are the standards-compliant ETG6010 and DS402, EtherCAT / CANopen objects AKD2G supports.
Axis 1 Index Axis 2 Index Name Note 60B8h 68B8h Touch probe function / control 60B9h 68B9h Touch probe status 60BAh 68BAh Touch probe position 1 positive value AXIS#.PL.FB, Scaling same as axis 60BBh 68BBh Touch probe position 1 negative value 60BCh 68BCh Touch probe position 2 positive value 60BDh 68BDh Touch probe position 2 negative value 60D0H 68D0h Touch probe source - The KAS IDE"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
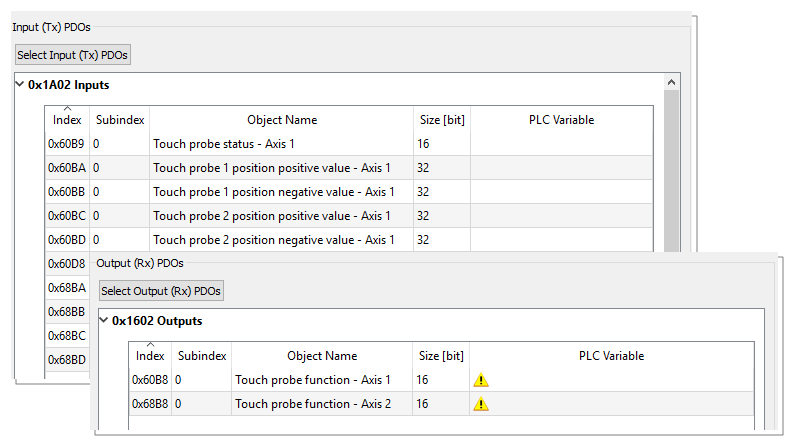
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger prepopulates the following PDOs with the required Touch probe objects by default.
- Rx PDOPDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. 0x1602 with the required Touch Probe control objects
- Tx PDO 0x1A02 with the required Touch Probe status and position value objects.
- Rx PDO
- The Trigger input source can be set by sending a SDO command.
- Axis1:
0x60D0 sub Index 1 for Touch Probe 1 Source
0x60D0 sub Index 2 for Touch Probe 2 Source
- Axis2:
0x68D0 sub Index 1 for Touch Probe 1 Source
0x68D0 sub Index 2 for Touch Probe 2 Source
- Axis1:
- 6#D0h, Touch Probe Source. The following table shows how AKD2G signals are mapped to the touch probe source entry in the object dictionary. Note that a few sources appear in both the standard and the manufacture ranges to provide some consistency.
| DS402 & ETG6010 Values | Text from Standard | AKD2G Values for 6#D0h | Equivalent CAP#.TRIGGER | AKD2G Note |
|---|---|---|---|---|
| -32768 to -1 | Manufacturer specific | -41 to -42 | 41 to 42 | Z pulse for Axis 1 to 2 |
| -31 to -35 | 31 to 35 | Z pulse for Feedback 1 to 5
As FB1, 2, 4, and 5 do not support Z pulses then these will not be shown.
When we support SFA on FB 1 and 2 then Z pulse may be possible. X23 is optional so if not fitted then -33 will not be valid. |
||
| -21 to -26 | 21 to 26 | DIO1 to DIO6 When X22 is not fitted options -21 and -22 will not be valid. When X23 is not fitted options -23 to -26 will not be valid. |
||
| -1 to -12 | 1 to 12 | DIN1 to DIN12 When X22 is not fitted options -9 to -12 will not be valid. |
||
| 0 | Reserved | Not valid | ||
| 1 | Digital Input 1 (Touch Probe input) | 1 | 1 | DIN1. Fast Opto |
| 2 | Digital Input 2 (Touch Probe input) | 2 | 2 | DIN2. Fast Opto |
| 3 | Digital Input 3 (Touch Probe input) | Not valid | ||
| 4 | Digital Input 4 (Touch Probe input) | Not valid | ||
| 5 | Hardware zero pulse signal of position encoder | 5 | 41 for Axis 1 42 for Axis 2 |
Valid if PL.FBSOURCE is using a feedback that supports a Z pulse. |
| 6 | Software zero pulse encoder | Not valid | ||
| 7 to 32767 | Reserved | Not valid |






