AKD Support With MC_TouchProbe
Following are several tips related to using MC_TouchProbe with AKD drives.
-
-
To use Capture Engine 1 modify the input PDOs that are used and add the Latch
 The control word is used to activate the drive's latch status machine. The latch control word is processed independently of the EtherCAT bus cycle. The status word is used to return the drive's latch status Position 1 parameter.
The control word is used to activate the drive's latch status machine. The latch control word is processed independently of the EtherCAT bus cycle. The status word is used to return the drive's latch status Position 1 parameter.
-
-
When using position-based capture, the proper Capture Mode and FB Source may need to be set up in the drive. One place to do that is in the Position Capture Screen in the KAS IDE
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger embedded WorkBench: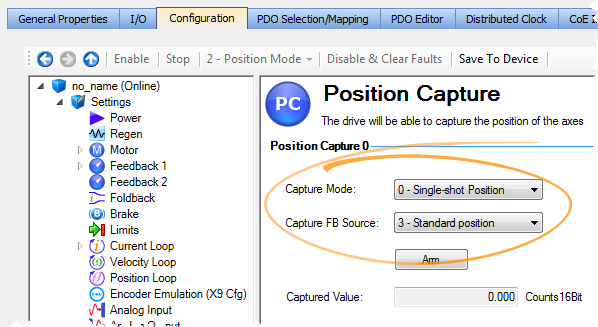
-
-
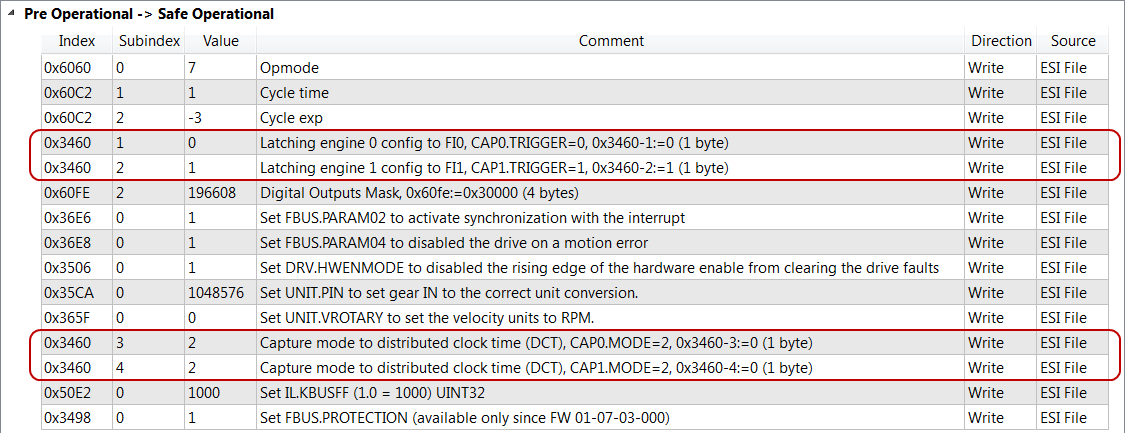
When setting up Position Capture, check the CoE-Init Command settings shown below. This is to verify they do not overwrite the corresponding drive parameters with unwanted values when the EtherCAT
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network initializes.