Form Fill and Seal PLC Open
Introduction
This application module details a 5 axis form, fill, and seal machine (FFS) using the PLCopen![]() A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML motion engine. The unwind axis maintains a desired tension on the film as the film transport; using registration marks on the film; positions the film. When in position the filling screw fills the bag, the sealing jaw will seal the bag, and the flying shear will cut on the seal to provide each individually formed, filled, and sealed bag.
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML motion engine. The unwind axis maintains a desired tension on the film as the film transport; using registration marks on the film; positions the film. When in position the filling screw fills the bag, the sealing jaw will seal the bag, and the flying shear will cut on the seal to provide each individually formed, filled, and sealed bag.
|
|
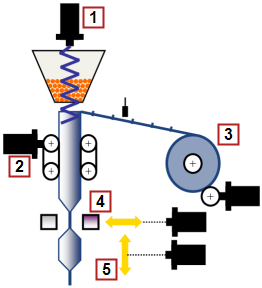
Figure 7-257: Form Fill and Seal Machine Overview
Unwind Axis
The unwind axis is geared to the virtual master axis. As the film is being unwound from the parent roll a dancer roll is monitoring the desired tension. If the tension is outside the desired adjustable dead band the gear ratio between the virtual master axis and unwind is adjusted to maintain the desired tension. The tension (Regulation Tn), gain to control the tension (Regulation Kp), minimum and maximum dead band (Deadband Min & Deadband Max) is entered on the control panel.
Filling Axis
The filling axis is geared to the master virtual axis based on a profile (FillingScrew). The start position, speed, and quantity variables for the filling screw are entered on the operator panel. The start position is the position on the master axis that the filling axis profile (Filling Screw) will start. The speed is the time from the start position to a point in the master position that the filling screw profile follows the master. The quantity is the amount of the “FillingScrew” profile to be executed.
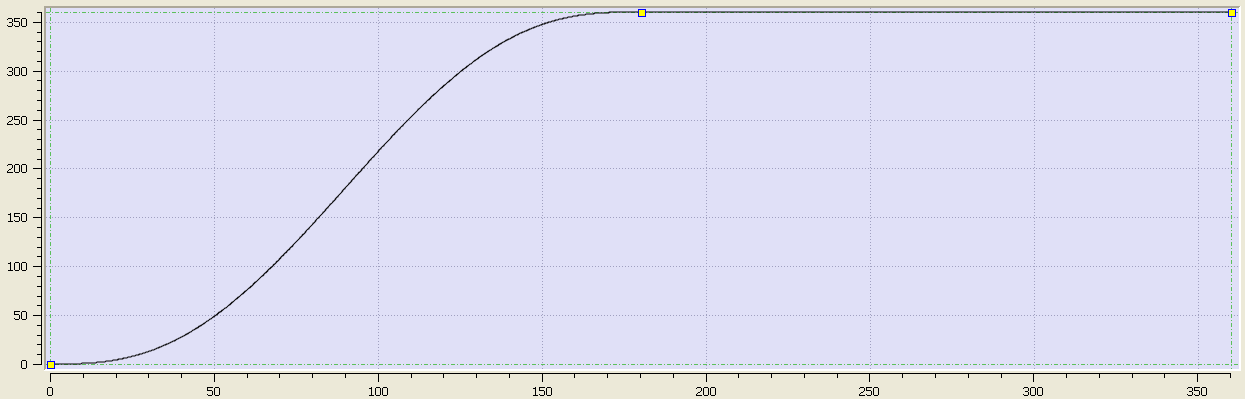
Figure 7-258: Filling Screw Base Profile
Film Transport Axis
The film transport axis monitors the registration marks on the film and adjusts the film based on the registration mark parameters, Open Window, Close Window, and Reference Position entered on the operator panel. If the registration mark is detected between the Open Window and Close Window the registration mark is considered a good mark and the Reference Position value will be used to calculate the necessary adjustment. If the registration mark is detected outside the Open Window and Close Window values then the registration mark is ignored. Adjustments are not made during the seal process to avoid destroying product.
Sealing Jaw
The sealing jaw axis is geared to the master virtual axis based on a profile (SealingJaw). The profile will start at the same starting position as the flying shear. The seal time is entered at the operator interface.
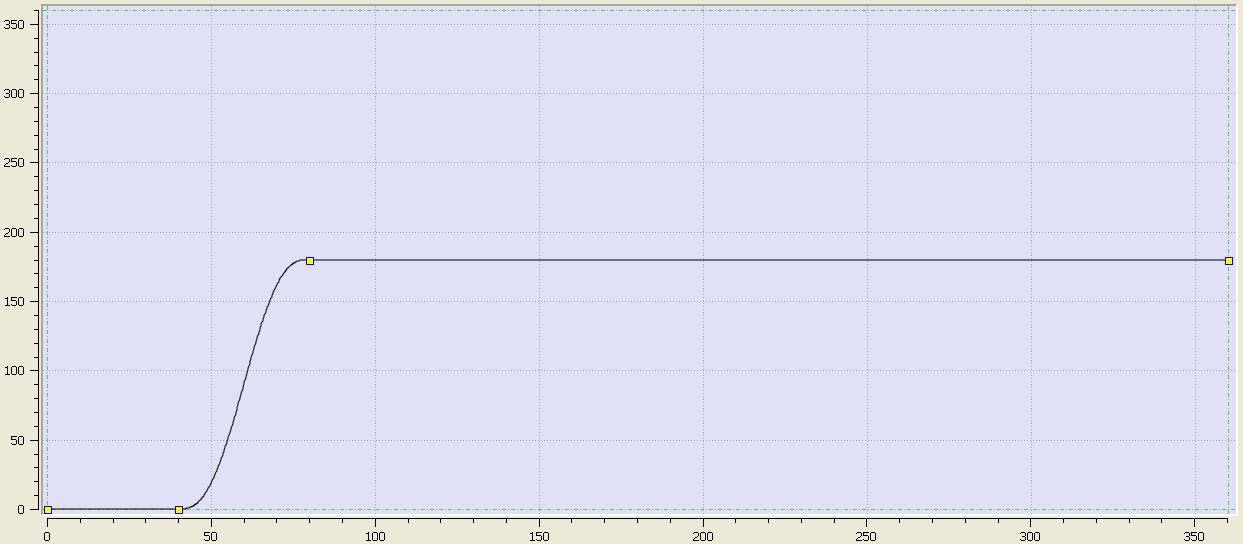
Figure 7-259: Sealing Jaw Base Profile
Flying Shear
The flying shear axis is geared to the master virtual axis based on a profile (FlyingShear). The profile will start at the starting position entered at the operator interface.
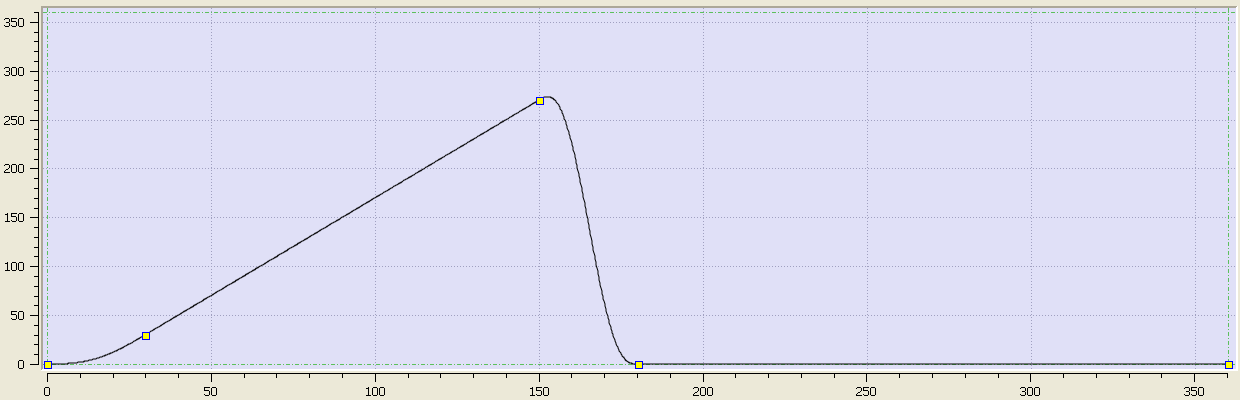
Figure 7-260: Flying Shear Base Profile
PLC Program Code
Key Function![]() A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. Blocks and Kollmorgen UDFBs used in the application
A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. Blocks and Kollmorgen UDFBs used in the application
| Name | How Used |
|---|---|
|
MC_GearIn |
Gears one axis to another |
|
MC_CamIn |
Gears one axis to another using a cam profile |
|
MC_TouchProbe |
The main section of the PLC![]() "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events code contains several If/Then statements. The program sets up gearing and cam profiles for the slave axis to a virtual master. The virtual master controls the machine speed. The slave axes are manipulated by either changing the operator panel inputs or profiles. The program is monitoring registration marks on the film and making correction to the film position based on the entries at the operator panel.
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events code contains several If/Then statements. The program sets up gearing and cam profiles for the slave axis to a virtual master. The virtual master controls the machine speed. The slave axes are manipulated by either changing the operator panel inputs or profiles. The program is monitoring registration marks on the film and making correction to the film position based on the entries at the operator panel.
CASE StepCounter OF
0:
Inst_MC_GearIn( TRUE, VirtualMaster, Unwind, 1, 1, 10000, 10000, 0, 0 );
Inst_MC_GearIn1( TRUE, VirtualMaster, FilmTransport, 1, 1, 10000, 10000, 0, 0 );
Inst_MC_CamIn( TRUE, VirtualMaster, FillingScrew, 0, 0, 360, 360, 0, ProfileIDFillingScrew, 0 );
Inst_MC_CamIn1( TRUE, VirtualMaster, SealingJaw, 0, 0, 360, 360, 0, ProfileIDSealingScrew, 0 );
Inst_MC_CamIn2( TRUE, VirtualMaster, FlyingShear, 0, 0, 360, 360, 0, ProfileIDFlyingShear, 0 );
IF Inst_MC_GearIn.InGear AND Inst_MC_GearIn1.InGear AND Inst_MC_CamIn.InSync AND Inst_MC_CamIn1.InSync AND Inst_MC_CamIn2.InSync THEN
StepCounter := 1;
END_IF;
1:
IF MachineStart THEN
IF MasterVelocity <> OldMasterVelocity THEN
Inst_MC_MoveVelocity2( FALSE, VirtualMaster, MasterVelocity, 10000, 10000, 0, 0, 0 );
Inst_MC_MoveVelocity2( TRUE, VirtualMaster, MasterVelocity, 10000, 10000, 0, 0, 0 );
OldMasterVelocity := MasterVelocity;
END_IF;
ELSE
OldMasterVelocity := 0;
END_IF;
(*********
Unwind Axis with Dancer Control
Monitor Dancer and change Gear Ratio between VirtualMaster and Unwind Axis to maintain desired tension
May also want to change gear ratio as the radius of feed material decreases due to web being used
Dancer range 0-10V, 5V mid, adjustable deadband, > deadband increase speed, < deadband decrease speed
**********)
IF MachineStart THEN
IF DancerAnalogSignal < DeadBandMin OR DancerAnalogSignal > DeadBandMax THEN
UnwindGear := (DancerAnalogSignal - 5) * Kp;
IF Tn > 0 THEN
UnwindGearI := OldUnwindGearI + (DancerAnalogSignal - 5) * Kp/Tn*1000;
OldUnwindGearI := UnwindGearI;
ELSE
UnwindGearI := 0;
OldUnwindGearI := 0;
END_IF;
UnwindGear := UnwindGear + UnwindGearI;
IF UnwindGear > 1 THEN
UnwindGear := 1;
OldUnwindGearI := 1;
ELSIF UnwindGear < -1 THEN
UnwindGear := -1;
OldUnwindGearI := -1;
END_IF;
Inst_MC_GearIn( FALSE, VirtualMaster, Unwind, any_to_dint((UnwindGear + 1)*10000000), 10000000, 10000, 10000, 0, 0 );
Inst_MC_GearIn( TRUE, VirtualMaster, Unwind, any_to_dint((UnwindGear + 1)*10000000), 10000000, 10000, 10000, 0, 0 );
END_IF;
END_IF;
//Filling Axis
ON ActPosVirtualMaster < 10 DO
Inst_MC_CamIn( FALSE, VirtualMaster, FillingScrew, FillingStartPosition, 0, FillingSpeed, FillingQuantity, 0, ProfileIDFillingScrew, 0 );
END_DO;
Inst_MC_CamIn( TRUE, VirtualMaster, FillingScrew, FillingStartPosition, 0, FillingSpeed, FillingQuantity, 0, ProfileIDFillingScrew, 0 );
Inst_MC_Phasing( Test, VirtualMaster, FlyingShear, PhaseFillingScrew, MasterVelocity * 3, 10000, 10000, 0, 0 );
//Film Transport Axis
//Monitor registration marks and make adjustments to FilmTransport Axis
Inst_MC_TouchProbe( TRUE, VirtualMaster, TriggerRef, FALSE, 0, 0 );
IF Inst_MC_TouchProbe.Done THEN
RegistrationMarkPos := Inst_MC_TouchProbe.RecordedPosition;
Inst_MC_TouchProbe( FALSE, VirtualMaster, TriggerRef, FALSE, 0, 0 );
Inst_MC_TouchProbe( TRUE, VirtualMaster, TriggerRef, FALSE, 0, 0 ); //Rearm for next registration mark
IF RegistrationMarkPos > OpenWindowPos AND RegistrationMarkPos < CloseWindowPos THEN //Check if mark was within good window
IF RegistrationMarkPos < ReferencePos THEN //Check if phase forward or backward is required
Adjustment := ReferencePos-RegistrationMarkPos;
ELSE
Adjustment := ReferencePos-RegistrationMarkPos;
END_IF;
NewMarkHit := TRUE;
END_IF;
END_IF;
IF NewMarkHit AND ActPosVirtualMaster > 180 AND ActPosVirtualMaster < 250 THEN //Do not make adjustment during sealing process
Inst_MC_MoveSuperimp( FALSE, FilmTransport, Adjustment, MasterVelocity*3, 10000, 10000, 0, 0 );
Inst_MC_MoveSuperimp( TRUE, FilmTransport, Adjustment, MasterVelocity*3, 10000, 10000, 0, 0 );
NewMarkHit := FALSE;
END_IF;
//Flying Shear
ON ActPosVirtualMaster < 10 DO
Inst_MC_CamIn2( FALSE, VirtualMaster, FlyingShear, ShearStartPosition, 0, 360, 360, 0, ProfileIDFlyingShear, 0 );
END_DO;
Inst_MC_CamIn2( TRUE, VirtualMaster, FlyingShear, ShearStartPosition, 0, 360, 360, 0, ProfileIDFlyingShear, 0 );
//Sealing Bar
ON ActPosVirtualMaster < 10 DO
Inst_MC_CamIn1( FALSE, VirtualMaster, SealingJaw, ShearStartPosition, 0, 360, 360, 0, ProfileIDSealingScrew, 0 );
END_DO;
Inst_MC_CamIn1( TRUE, VirtualMaster, SealingJaw, ShearStartPosition, 0, 360, 360, 0, ProfileIDSealingScrew, 0 );
ON ActPosVirtualMaster > (80 + ShearStartPosition) DO
Inst_TON( FALSE, SealTime );
END_DO;
Inst_TON( TRUE, SealTime );
ON Inst_TON.Q DO
Inst_MC_MoveSuperimp1( FALSE, SealingJaw, -180, MasterVelocity*4, 10000, 10000, 0, 0 );
Inst_MC_MoveSuperimp1( TRUE, SealingJaw, -180, MasterVelocity*4, 10000, 10000, 0, 0 );
END_DO;
END_CASE;
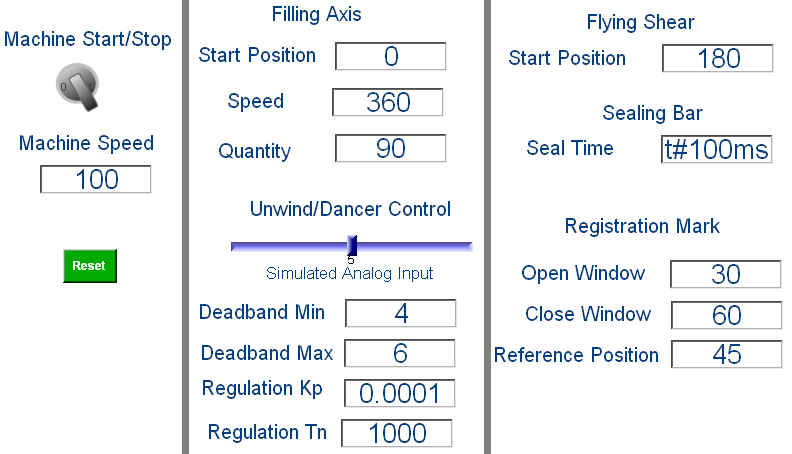
Operator Panel
The Kollmorgen Automation Suite (KAS) program for this application module has an internal operator panel. The operator panel is used to set the desired values for each product and to start and stop the machine. The specific entries are described in the axis sections above. Below is a screen print of the operator panel.