 GetCtrlErrors
GetCtrlErrors

Returns active errors and alarms on the controller in two arrays of hundred Booleans. Every index in the array corresponds to the error and alarm numbers in the tables. See PDMM and PCMM Errors and Alarms for a list of errors and alarms that may be generated.
Arguments
Input
| EN | BOOL | Enable |
| ActiveError | BOOL[100] | Array of bool with the size equal to 100 |
| ActiveAlarm | BOOL[100] | Array of bool with size equal to 100 |
Output
| OK | BOOL | |
| Q | DINT | Status of the execution |
Status meaning:
| Bit 0 | Value 0 | No error, no alarm, no shut down |
| Bit 0 | Value 1 | There is an active error or an active alarm (i.e. there is something in the array ActiveError/ActiveAlarm) |
| Bit 1 | Value 0 | No shut down |
| Bit 1 | Value 1 | The PLC |
| Bit 2-15 | Value 2 | 4 | 9 to 2147483648 | reserved |
Examples
-
- See Checking for existing EtherCAT Alarms and Errors: in the EtherCAT Communication Diagnosis Steps section of the Troubleshooting chapter for an example of implementing this function.
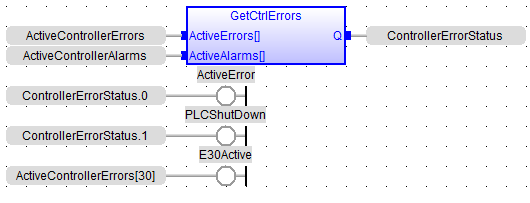
FBD
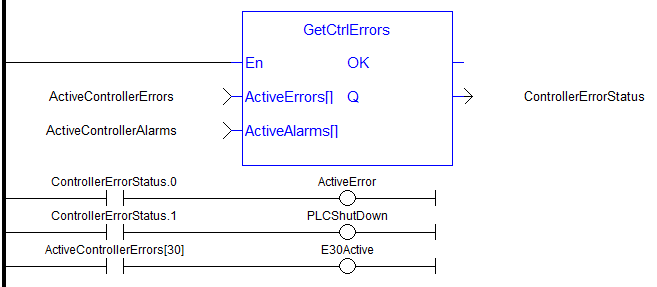
FFLD
ST
//Retrieve active controller level alarm and errors.
//Check status output to see if any error or alarm is active and if PLC is shutting down
ControllerErrorStatus:= GetCtrlErrors( ActiveControllerErrors, ActiveControllerAlarms);
ActiveError:= ControllerErrorStatus.0;
PLCShutDown:= ControllerErrorStatus.1;
E30Active:= ActiveControllerErrors[30];






