![]()
 Function Block - PID loop.
Function Block - PID loop.See Regulation.
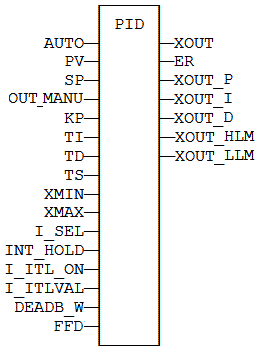
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
AUTO |
BOOL |
FALSE, TRUE |
N/A |
N/A |
|
|
DEADB_ERR |
REAL |
No range |
Process Value Units |
N/A |
Hysteresis on PV.
|
|
FFD |
REAL |
No range |
Process Value Units |
N/A |
Disturbance value on output. |
|
I_ITL_ON |
BOOL |
FALSE, TRUE |
N/A |
N/A |
If TRUE, the integrated value is reset to I_ITLVAL. |
|
I_ITLVAL |
REAL |
No range |
Process Value Units |
N/A |
Reset value for integration when I_ITL_ON is TRUE. |
|
I_SEL |
BOOL |
FALSE, TRUE |
N/A |
N/A |
If FALSE, the integrated value is ignored. |
|
INT_HOLD |
BOOL |
FALSE, TRUE |
N/A |
N/A |
If TRUE, the integrated value is frozen. |
|
KP |
REAL |
No range |
No Units |
N/A |
Gain. |
|
PV |
REAL |
No range |
Process Value Units |
N/A |
Process value. |
|
SP |
REAL |
No range |
Process Value Units |
N/A |
Set point. |
|
TD |
REAL |
No range |
1/sec |
N/A |
Derivation factor. |
|
TI |
REAL |
No range |
Sec |
N/A |
Integration factor. |
|
TS |
TIME |
No range |
Time Units |
N/A |
Sampling period. |
|
XMAX |
REAL |
No range |
Process Value Units |
N/A |
Maximum output value. |
|
XMIN |
REAL |
No range |
Process Value Units |
N/A |
Minimum allowed output value. |
|
Xout_Manu |
REAL |
No range |
Process Value Units |
N/A |
Output value in manual mode. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
ER |
REAL |
No range |
Process Value Units |
Last calculated error. |
|
Xout |
REAL |
No range |
Process Value Units |
Output command value. |
|
Xout_D |
REAL |
No range |
Process Value Units |
Last calculated derivated value. |
|
Xout_HLM |
BOOL |
FALSE, TRUE |
N/A |
TRUE if the output value is saturated to XMAX. |
|
Xout_I |
REAL |
No range |
Process Value Units |
Last calculated integrated value. |
|
Xout_LLM |
BOOL |
FALSE, TRUE |
N/A |
TRUE if the output value is saturated to XMIN. |
|
Xout_P |
REAL |
No range |
Process Value Units |
Last calculated proportional value. |
Remarks
- It is important for the stability of the control that the TS sampling period is much bigger than the cycle time.
- Output of the PID block always starts with zero.
- The value varies per the inputs provided upon further cycle executions.
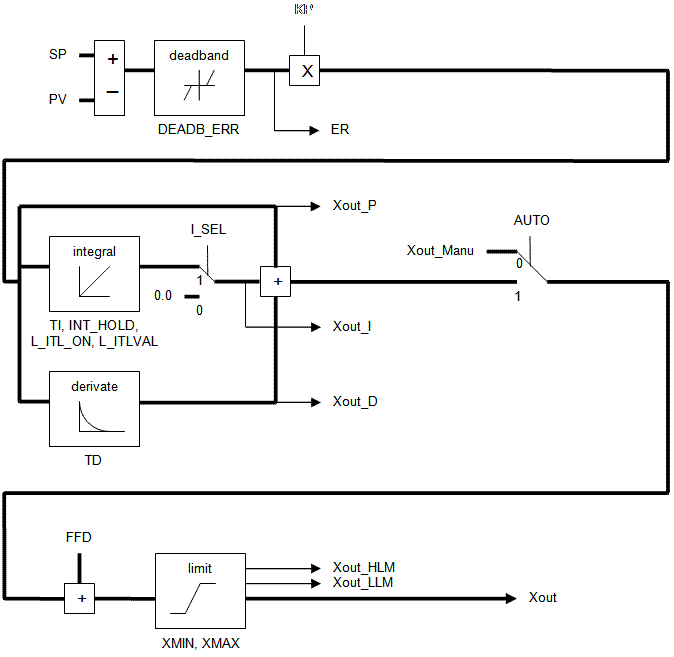
Diagram
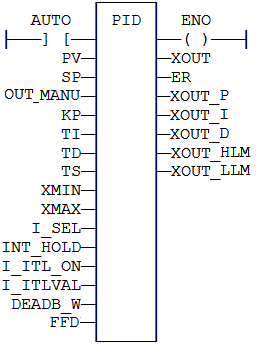
FBD Language Example
FFLD Language Example
- In the FFLD Language, the output rung has the same value as the AUTO input, corresponding to the input rung.
- ENO has the same state as the input rung.
IL Language Example
Not available.
ST Language Example
(* MyPID is a declared instance of PID function block. *)
MyPID (AUTO, PV, SP, XOUT_MANU, KP, TI, TD, TS, XMIN, XMAX, I_SEL, I_ITL_ON, I_ITLVAL, DEADB_ERR, FFD);
XOUT := MyPID.XOUT;
ER := MyPID.ER;
XOUT_P := MyPID.XOUT_P;
XOUT_I := MyPID.XOUT_I;
XOUT_D := MyPID.XOUT_D;
XOUT_HLM := MyPID.XOUT_HLM;
XOUT_LLM := MyPID.XOUT_LLM;





