Axis Data Parameters
In the PLCopen Axis Data dialog (Figure 1):
- If a Servo/Stepper axis is selected, two tabs are available:
- Axis Data
- Axis Limits
- If a Digitizing axis is selected, only the Axis Data tab is available.
- By default, new axes are defined using degrees as the measurement unit.
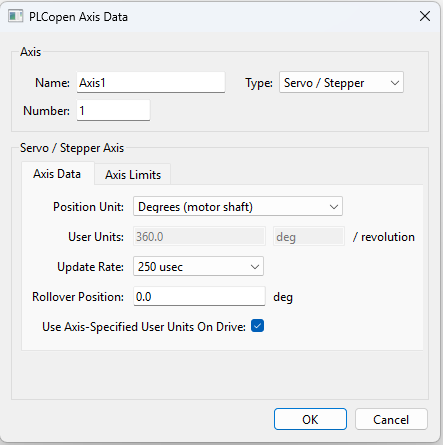
Figure 1: Servo/Stepper Axis - Axis Data tab
The Servo/Stepper Axis - Axis Data parameters are:
|
Parameter |
Description |
|---|---|
|
Position Unit |
|
|
|
|
Update Rate |
The rate at which the axis's feedback is read and a new command position is generated. The choices are:
This rate can be slower or equal to the EtherCAT Cycle Time.
|
Example
|
|
|
Use Axis-specified User Units on Drive |
|





