Description
BODE.MODE sets the mode of the excitation. The excitation can be set to the modes shown in the table below. BODE.MODE is always set to None when Ethernet communication is disconnected. The peak amplitude of the excitation is set by either BODE.IAMP or BODE.VAMP (depending on BODE.INJECTPOINT).
BODE.MODE is subject to a watchdog timer (BODE.MODETIMER) as follows:
- If BODE.MODETIMER is 0, then BODE.MODE is not affected.
- If BODE.MODETIMER is set to a value greater than 0, then BODE.MODE will be set to 0 (None) after the BODE.MODETIMER time milliseconds.
- If BODE.MODE is a nonzero value, and you reset BODE.MODE to another nonzero value, you will reset the watchdog timer. This mechanism is intended to turn off the excitation signal if you lose communication with the drive.
| BODE.MODE | Description | Comments |
|---|---|---|
|
0 |
None |
Turns all excitation off |
|
1 |
PRB |
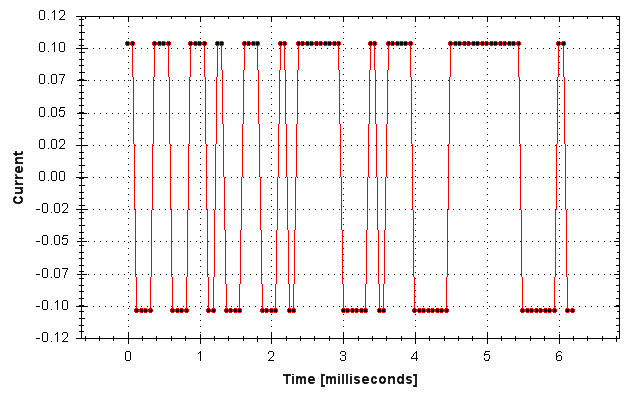
Uses Pseudo Random Binary (PRB) excitation. PRB is a signal that is always +/- peak amplitude, varying only in phase. PRB excitation results in a flat excitation frequency spectrum. PRB results in a high peak excitation amplitude, which can help minimize friction in a frequency response test. PRB excitation repeats every (2^BODE.PRBDEPTH) / BODE.EXCITEGAP drive samples. This repetition can be used to reveal the effects of friction. |
|
2 |
Sine |
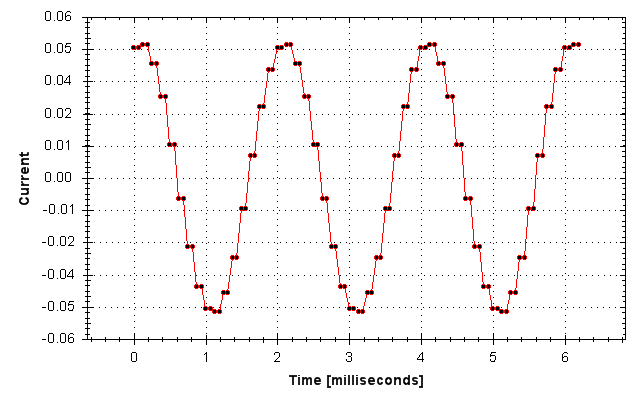
Uses Sine excitation |
|
3 |
Noise |
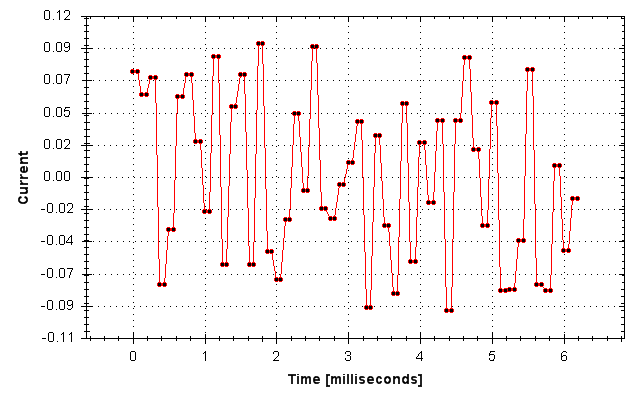
Uses random noise excitation. Noise is a random number generator that varies between +/- peak amplitude. |
| 4 | Offset |
Sets a torque offset equal to BODE.IAMP |
Example
Set BODE.MODE to PRB:
-->BODE.MODE 1
Get BODE.MODE (already set to PRB):
-->BODE.MODE 1
PRB excitation:
Sine excitation:
Noise excitation:
General Information
|
Type |
R/W Parameter |
|
Units |
N/A |
|
Range |
0 to 4 |
|
Default Value |
0 |
|
Data Type |
Integer |
|
Start Version |
M_01-00-00-000 |
Variants Supported
| Variant | Supported |
|---|---|
| AKD Base | Yes |
| AKD with Position Indexer | Yes |
| AKD EtherCAT | Yes |
| AKD CANopen | Yes |
| AKD BASIC | Yes |
| AKD SynqNet | Yes* |
| AKD EtherNet/IP | Yes |
| AKD PROFINET | Yes |
| AKD Sercos® III | Yes |
| AKD-N | Yes |
| AKD-C | No |
*In SynqNet, a parameter may be available in the firmware but have no effect on the system. See SynqNet Supported Parameters.
Fieldbus Information
If your drive type is listed as supported but no index, address, or instance number is listed, then this parameter is accessible through WorkBench, but not over your fieldbus type.
| Fieldbus | Address | Attributes | Signed? |
|---|---|---|---|
|
PROFINET |
2023 | Byte | No |
| Sercos® III | 2 Octets |
| Instance | Data Size | Data Type |
|---|---|---|
| 24 | 1 Byte | Integer |
| Register Address | Is 64 bit? | Attributes | Signed? | Object Start Version |
|---|---|---|---|---|
|
46 |
No | 8 bit | No | M_01-03-00-000 |
Related Topics
Using the Performance Servo Tuner
Using the Performance Servo Tuner: Advanced






