Description
SM.MODE defines the mode of service motion for each loop. Two types of service motion are available :
- A constant motion in one direction (endless or for a certain amount of time).
- An alternating motion.
The possible modes for this parameter are described in the following table:
| SM.MODE | Description | Requirements |
|---|---|---|
|
0 |
Constant motion in closed current loop mode of operation.
The service motion can be stopped by using the DRV.STOP command. |
DRV.OPMODE = 0,1, or 2 DRV.CMDSOURCE = 0 |
|
1 |
|
DRV.OPMODE = 0, 1, or 2 DRV.CMDSOURCE = 0
|
| 2 | This mode executes the same service motion as mode 0. However, the motion is described by SM.I2, SM.T2 and SM.V2. This enables a change on the fly and is mostly used under fieldbus control. |
DRV.OPMODE = 0, 1, or 2 DRV.CMDSOURCE = 0 |
Ramps
The drive uses DRV.ACC and DRV.DEC for the ramps in DRV.OPMODE 1 (closed velocity) and 2 (closed position). The drive does not generate any ramps in service motion mode 0 and 1.
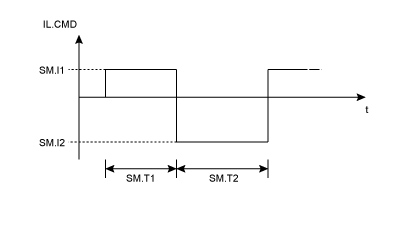
Service Motion for DRV.OPMODE 0 and SM.MODE 1
Service motion for DRV.OPMODE 1 or 2 and SM.MODE 1
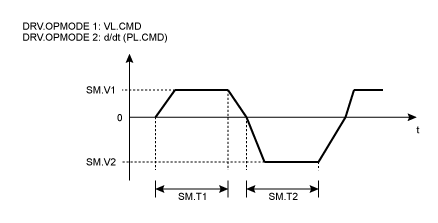
The deceleration process from SM.V1 or SM.V2 to 0 is not included in SM.T1 and SM.T2, respectively. SM.T1 and SM.T2 start as soon as the command value has reached the velocity 0.
General Information
|
Type |
NV Parameter |
|
Units |
N/A |
|
Range |
0 to 2 |
|
Default Value |
0 |
|
Data Type |
Integer |
|
See Also |
SM.I1, SM.I2, SM.MOVE, SM.T1 SM.T2, SM.V1, SM.V2, DRV.ACCDRV.DEC |
|
Start Version |
M_01-01-00-000 |
Variants Supported
| Variant | Supported |
|---|---|
| AKD Base | Yes |
| AKD with Position Indexer | Yes |
| AKD EtherCAT | Yes |
| AKD CANopen | Yes |
| AKD BASIC | Yes |
| AKD SynqNet | Yes* |
| AKD EtherNet/IP | Yes |
| AKD PROFINET | Yes |
| AKD Sercos® III | Yes |
| AKD-N | Yes |
| AKD-C | No |
*In SynqNet, a parameter may be available in the firmware but have no effect on the system. See SynqNet Supported Parameters.
Fieldbus Information
If your drive type is listed as supported but no index, address, or instance number is listed, then this parameter is accessible through WorkBench, but not over your fieldbus type.
| Index/Subindex | Object Start Version |
|---|---|
|
5177h /0 |
M_01-01-00-000 |
| Fieldbus |
Address |
Attributes | Signed? |
|---|---|---|---|
|
PROFINET |
2375 | Word | No |
| Sercos® III | 2 Octets |
| Instance | Data Size | Data Type |
|---|---|---|
| 376 | 2 Byte | Integer |
| Register Address | Is 64 bit? | Attributes | Signed? | Object Start Version |
|---|---|---|---|---|
|
750 |
No | 16 bit | No | M_01-03-00-000 |
Related Topics






