![]()
![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Initializes the kinematic limits for the axis group.
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Initializes the kinematic limits for the axis group.
Inputs
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
No range |
N/A |
If TRUE, the command completed successfully. |
|
Error |
BOOL |
No range |
N/A |
If TRUE, an error has occurred. |
|
ErrorID |
INT |
No range |
N/A |
Indicates the error if Error output is TRUE. |
Remarks
-
-
The function block returns an error if the group state is not GroupStandby or GroupDisabled.
- See Coordinated Motion, the top-level topic for Coordinated Motion.
- During a move, the motion engine verifies that the limits are not exceeded.
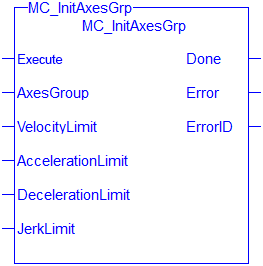
Figure 1: MC_InitAxesGrp
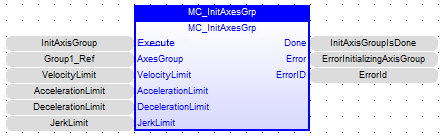
FBD Language Example
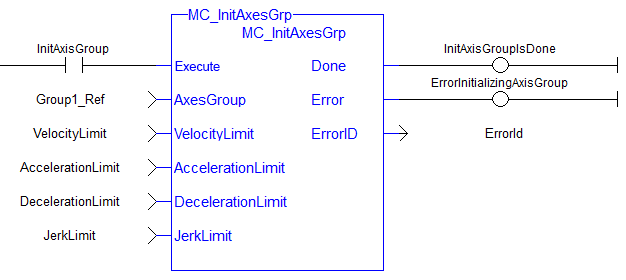
FFLD Language Example
IL Language Example
BEGIN_ILInstruction list - This is a low-level language and resembles assembly. CAL Inst_MC_InitAxesGrp( initAxesGrp, grp, velLim, accelLim, decelLim, jerkLim )
END_IL
ST Language Example
(* Inst_MC_InitAxesGrpST example *)Inst_MC_InitAxesGrp( initAxesGrp, grp, velLim, accelLim, decelLim, jerkLim );
See Also






