![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Sets the kinematic transform between the Machine
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Sets the kinematic transform between the Machine![]() The complete assembly of all connected parts or devices, of which at least one is movable. Coordinate System
The complete assembly of all connected parts or devices, of which at least one is movable. Coordinate System![]() The reference system in which a coordinate or path is described. and the Axes Coordinate System.
The reference system in which a coordinate or path is described. and the Axes Coordinate System.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
0, 1 |
N/A |
No default |
On the rising edge |
|
AxesGroup |
No range |
N/A |
No default |
The axes group that receives the axis trajectory |
|
|
KinTransform |
MC_KIN_REF |
No range |
N/A |
No default |
Kinematic robotic transform defined by the MC_KIN_REF Structure. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
|
|
If TRUE, the command completed successfully. |
|
Error |
BOOL |
|
|
If TRUE, an error has occurred. |
|
ErrorID |
INT |
|
|
Indicates the error if Error output is TRUE. |
Remarks
- See Function Blocks - General Rules about how inputs and outputs work.
-
- After MC_SetKinTra(...) is called, the controller automatically calculates the inverse kinematics for the robot axes, converting the robot path
 Set of continuous positions and orientation information in multi-dimensional space.
Geometrical description of a space curve that the TCP of an axesgroup moves along. motion into the individual robot joint axis trajectories.
Set of continuous positions and orientation information in multi-dimensional space.
Geometrical description of a space curve that the TCP of an axesgroup moves along. motion into the individual robot joint axis trajectories. - Several transform types are available for common robotic systems and are configurable with the MC_KIN_REF Structure.
- The parameters in the MC_KIN_REF structure define the specific robot geometry.
- See MC_KIN_REF Structure for a description of the structure.
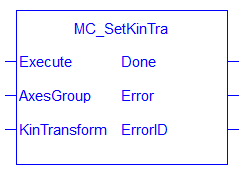
Figure 1: MC_SetKinTra
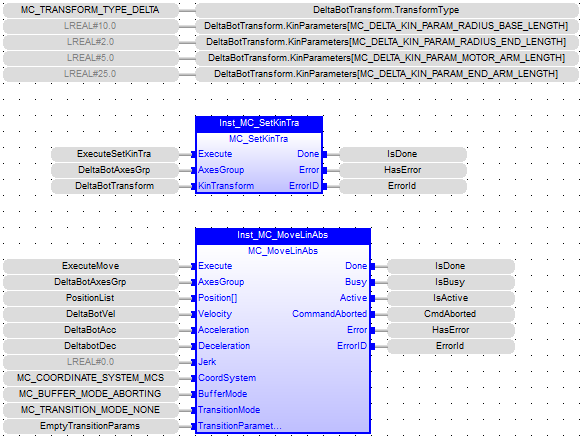
FBD Language Example
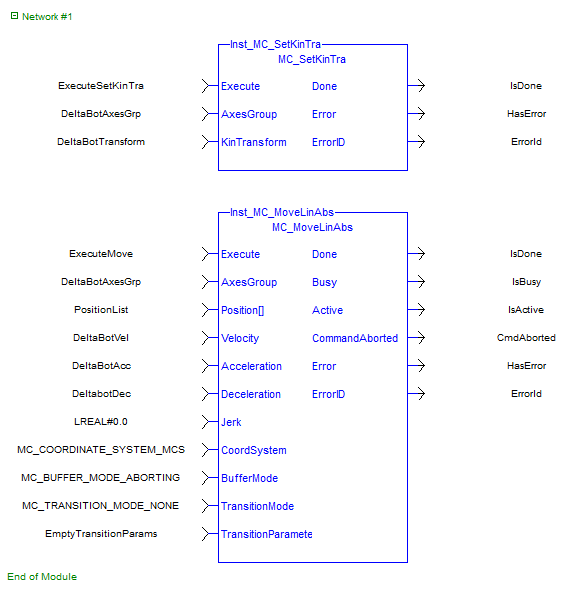
FFLD Language Example
IL Language Example
Not available.
ST Language Example
// MC_SetKinTra ST Example
// DeltaBotTransform is of type MC_KIN_REF
DeltaBotTransform.TransformType := MC_TRANSFORM_TYPE_DELTA; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_RADIUS_BASE_LENGTH] := 10.0; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_RADIUS_END_LENGTH] := 2.0; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_MOTOR






