![]()
![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Returns the status of an axes group.
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Returns the status of an axes group.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
BOOL |
FALSE, TRUE |
N/A |
No default |
If TRUE, the axes group status is read. |
|
|
AxesGroup |
No range |
N/A |
No default |
The axes group the status is read from. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Valid |
BOOL |
FALSE, TRUE |
N/A |
TRUE of valid outputs are available. |
|
GroupMoving1 |
BOOL |
FALSE, TRUE |
N/A |
The axes group is in the Moving state. This indicates the group is enabled and currently executing a coordinated motion command. |
|
GroupHoming1 |
BOOL |
FALSE, TRUE |
N/A |
Not supported. |
|
GroupErrorStop1 |
BOOL |
FALSE, TRUE |
N/A |
The axes group is in the ErrorStop state due to an axis error or group error.
|
|
GroupStandby1 |
BOOL |
FALSE, TRUE |
N/A |
The axes group is in the Standby state.
|
|
GroupStopping1 |
BOOL |
FALSE, TRUE |
N/A |
The axes group is in the Stopping state due the execution of MC_GrpStop.
|
|
GroupDisabled1 |
BOOL |
FALSE, TRUE |
N/A |
The axis group is in the Disabled |
|
ConstantVelocity |
BOOL |
FALSE, TRUE |
N/A |
TRUE if the commanded path
|
|
BOOL |
FALSE, TRUE |
N/A |
TRUE if the commanded path velocity is accelerating between the current scan of the application program and the previous scan. |
|
|
Decelerating |
BOOL |
FALSE, TRUE |
N/A |
TRUE if the commanded path velocity is decelerating between the current scan of the application program and the previous scan. |
|
InPosition |
BOOL |
FALSE, TRUE |
N/A |
These must be TRUE for the axes group to be in position:
|
|
Error |
BOOL |
FALSE, TRUE |
N/A |
If TRUE, an error has occurred. |
|
ErrorID |
BOOL |
FALSE, TRUE |
N/A |
Indicates the error identifier if the Error output is set to TRUE. |
1 These outputs are mutually exclusive. Only one is TRUE at a time.
All others are FALSE.
See Group State Diagrams.
Remarks
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller.
- See Coordinated Motion, the top-level topic for Coordinated Motion.
- MC_GrpReadStatus returns the status of an axes group.
- This function block does not cause any motion.
- See Group State Diagrams.
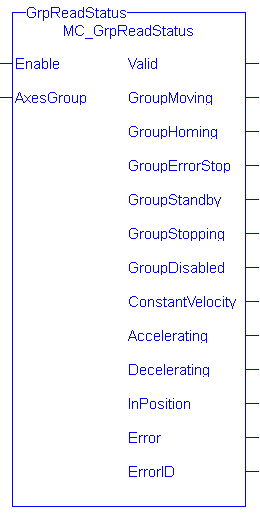
Figure 1: MC_GrpReadStatus
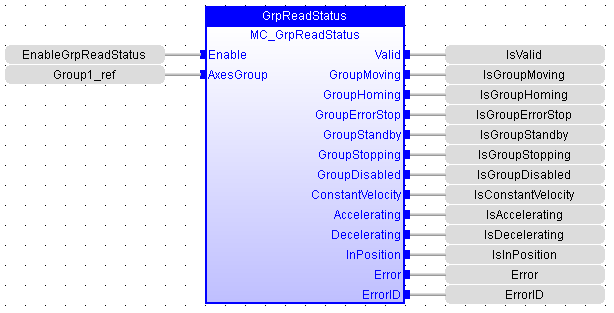
FBD Language Example
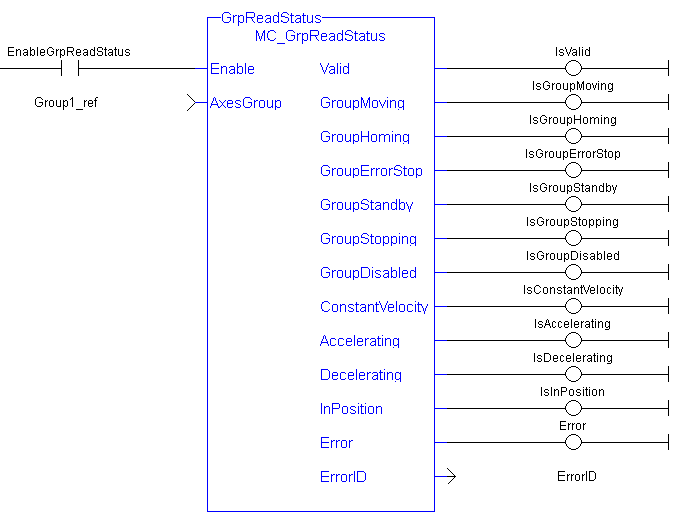
FFLD Language Example
IL Language Example
BEGIN_ILInstruction list - This is a low-level language and resembles assembly.
CAL Inst_MC_GrpReadStatus( EnableGrpReadStatus, Group1_Ref )
END_IL
ST Language Example
//Check boolean status bits for an Axis Group
Inst_MC_GrpReadStatus( EnableGrpReadStatus, Group1_Ref );
IsGroupMoving:= Inst_MC_GrpReadStatus.GroupMoving;
IsGroupErrorStop:= Inst_MC_GrpReadStatus.GroupErrorStop;
IsGroupStandby:= Inst_MC_GrpReadStatus.GroupStandby;
IsGroupDisabled:= Inst_MC_GrpReadStatus.GroupDisabled;
Accelerating:= Inst_MC_GrpReadStatus.Accelerating;
IsConstantVelocity:= Inst_MC_GrpReadStatus.ConstantVelocity;
IsInPosition:= Inst_MC_GrpReadStatus.InPosition;
See Also






