![]()
 Function
Function![]() A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Realigns the actual position
A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. - Realigns the actual position![]() Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. with the reference position by moving the axis by the specified delta position.
Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. with the reference position by moving the axis by the specified delta position.
- Causes the Axis to move by a programmed
 The act of performing a sequence of instructions or commands. amount without changing the Reference Position following an MLAxisStop.
The act of performing a sequence of instructions or commands. amount without changing the Reference Position following an MLAxisStop. - Allows the Pipe Position to be used following an MLAxisStop.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
LREAL |
No range |
User unit/sec2 |
No default |
Sets the Realign Acceleration. |
|
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
Sets the Realign Deceleration rate. |
|
DeltaPos |
LREAL |
No range |
User units |
No default |
Sets the Axis Delta Position or the relative distance to be moved. |
|
ID |
DINT |
No range |
N/A |
No default |
ID Name of the Axis block. |
|
Speed |
LREAL |
No range |
User unit/sec |
No default |
Sets the Axis Speed. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Default (.Q) |
BOOL |
FALSE, TRUE |
N/A |
Returns TRUE when the function successfully executes. |
Remarks
-
-
The realign function does not work properly if the MLAxisStop function is continuously executed using its Start input.
- When stopping the drive In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. a motion profile is applied to decelerate.
- During the deceleration, the Reference position changes.
- Calling MLAxisReAlign realigns the actual position with the reference position by moving the axis by the specified delta position, typically calculated by the application code.
- After a MLAxisStop is executed, MLAxisReAlign is required for the Pipe Position to be used again.
- See Restarting Motion with Pipe Network.
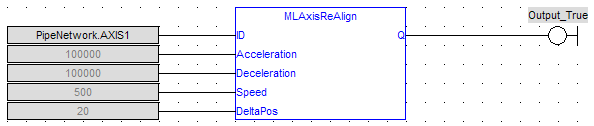
FBD Language Example
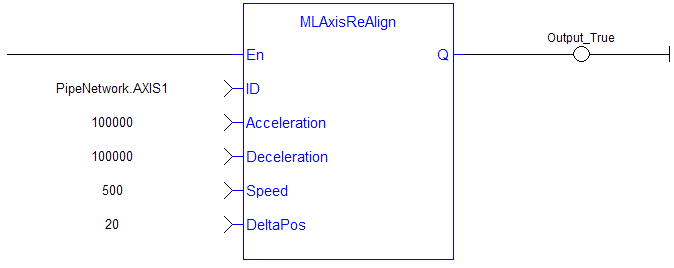
FFLD Language Example
IL Language Example
Not available.
ST Language Example
MLAxisReAlign(PipeNetwork.Axis1, 100000, 100000, 500, 20 ) ;
See Also






