![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Stop with the specified deceleration.
A function block groups an algorithm and a set of private data.
It has inputs and outputs. - Stop with the specified deceleration.
This does NOT remove the input source, but to stop the drive![]() In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. from continuing to move.
In electrical engineering, a drive is an electronic device to provide power to a motor or servo.
Control device for regulating the speed, torque and position of a motor.
A unit controlling a motor using the current and timing in its coils. from continuing to move.
- This function
 A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. stops any current Generator Motion.
A function calculates a result according to the current value of its inputs.
A function has no internal data and is not linked to declared instances. stops any current Generator Motion. - It causes the axis to start ignoring any changes in Pipe position Position means a point in space which is described by different coordinates.
Depending on the used system and transformation it can consist of a maximum of six dimensions (coordinates).This means three Cartesian coordinates in space and coordinates for the orientation.
In ACS there can be even more than six coordinates.
If the same position is described in different coordinate systems the values of the coordinates are different. to be added into the reference position.
- It decelerates, if moving, at a programmed The act of performing a sequence of instructions or commands. rate.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
ID |
DINT |
No range |
N/A |
No default |
ID Name of the Axis block. |
|
Start |
BOOL |
FALSE, TRUE |
N/A |
No default |
|
|
Deceleration |
LREAL |
No range |
User unit/sec2 |
No default |
|
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Default (.Q) |
BOOL |
FALSE, TRUE |
N/A |
Becomes TRUE when the Axis is completely stopped. |
|
GenPos |
LREAL |
|
User units |
Corresponds to the Generator Position input to the axis at the time the stop is triggered. See Axis Pipe Block about positions. |
|
PipePos |
LREAL |
|
User units |
Corresponds to the Pipe Position input to the axis at the time the stop is triggered. See Axis Pipe Block about positions. |
|
RealignPos |
LREAL |
|
User units |
Realign Position is the Reference Position at which the stop is triggered.
|
|
StopPos |
LREAL |
|
User units |
Corresponds to the last Reference Position sent to the drive at the time when the Axis is completely stopped.
|
Remarks
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller.
- After stopping the drive, the motion must be restarted by realigning the Actual Position with the Reference Position.
- See Axis Pipe Block about positions.
- When the stop occurs, the master keeps moving and the axis starts ignoring the Pipe Position value and begins a controlled stop based on the input parameters.
See Axis Pipe Block for more information about Pipe Position.- At this point, any Axis Block level profile (issued from an FB like MLAxisAbs, MLAxisRel...) are aborted.
- When the stop is complete, it is up to the application to decide how to move the axis, master, or both to a position where they can be realigned, and the master restarted.
- The MLAxisReAlign function is used to move the axis to a restart position in order to enable Enable signal for the drive, Hardware-Enable with 24V signal to X8, Software-Enable command by setup Software, fieldbus or permanently set.
Both are required for enabling the drive. synchronized Combines an axis or axes group (as slave) with an axis as master. The slave executes its path with synchronization to the progress of the master. This is linked to a one dimension source for synchronization. machine The complete assembly of all connected parts or devices, of which at least one is movable. motion to start again.
- Once the realign function is successfully completed, the Pipe Position is again summed with the Generator Position to create the Reference Position.
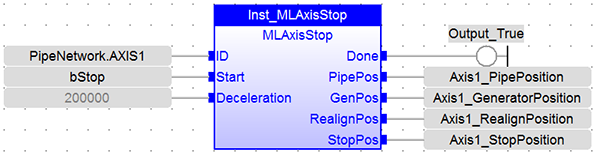
FBD Language Example
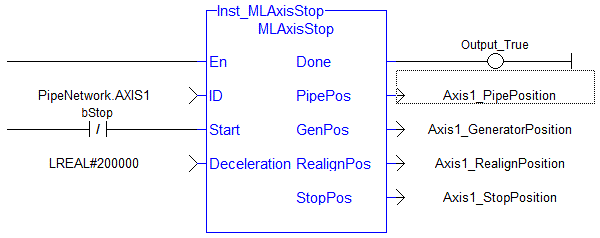
FFLD Language Example
IL Language Example
Not available.
ST Language Example
Inst_MLAxisStop(PipeNetwork.AXIS1, bStop, 200000);
If Inst_MLAxisStop.Done Then
Axis1_PipePosition := Inst_MLAxisStop.PipePos;
Axis1_GeneratorPosition := Inst_MLAxisStop.GenPos;
Axis1_RealignPosition := Inst_MLAxisStop.RealignPos;
Axis1_StopPosition := Inst_MLAxisStop.StopPos;
End_if;
See Also






