Motion Profile
In motion control![]() Motion control is a sub-field of automation, in which the position and/or velocity of machines are controlled using some type of device such as a hydraulic pump, linear actuator, or an electric motor, generally a servo. Motion control is an important part of robotics and CNC machine tools; however, it is more complex than in the use of specialized machines, where the kinematics is usually simpler. The latter is often called General Motion Control (GMC). Motion control is widely used in the packaging, printing, textile and assembly industries, a common need is to move a system from one steady position to another (point-to-point motion). Following the fastest possible motion within an allowed maximum value for speed, acceleration, and jerk
Motion control is a sub-field of automation, in which the position and/or velocity of machines are controlled using some type of device such as a hydraulic pump, linear actuator, or an electric motor, generally a servo. Motion control is an important part of robotics and CNC machine tools; however, it is more complex than in the use of specialized machines, where the kinematics is usually simpler. The latter is often called General Motion Control (GMC). Motion control is widely used in the packaging, printing, textile and assembly industries, a common need is to move a system from one steady position to another (point-to-point motion). Following the fastest possible motion within an allowed maximum value for speed, acceleration, and jerk![]() In physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time, results in a third-order motion profile as illustrated below:
In physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time, results in a third-order motion profile as illustrated below:
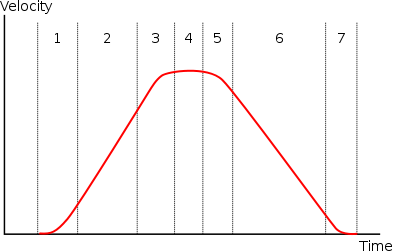
Figure 5-5: Third-order motion profile
The motion profile consists of up to seven phases defined by the following:
- acceleration increase, with maximum positive jerk
- constant maximum acceleration (zero jerk)
- acceleration decrease, approaching the desired maximum velocity, with maximum negative jerk
- constant maximum speed (zero jerk, zero acceleration)
- deceleration increase, approaching the desired deceleration, with maximum negative jerk
- constant maximum deceleration (zero jerk)
- deceleration decrease, approaching the desired position at zero velocity, with maximum positive jerk
If the initial and final positions are sufficiently close together, the maximum acceleration or maximum velocity may never be reached.







