 Modulo Position
Modulo Position
Die Modulo-Funktion dient zur Vereinfachung von Rotationsanwendungen wie z. B. in eine Richtung drehende Montagetische. Bei Freigabe konvertiert die Modulo-Achsfunktion mehrere positionsbasierte Parameter so, dass sie in einen festgelegten Modulo-Bereich fallen. Sobald dieser Bereich festgelegt ist, läuft ein gegebener Positionswert am Ende des Modulo-Bereichs über und kehrt zum Beginn des Modulo-Bereichs zurück. Dieses Verhalten hat Auswirkungen auf einige Servoverstärker-Funktionen, die bei aktivierter Modulo-Funktion mit moduloskalierten Positionsvariablen arbeiten.
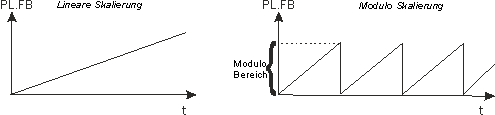
Die Abbildung unten veranschaulicht den Verlauf des Ist-Positionswerts (PL.FB) für lineare Skalierung und Modulo-Skalierung, wenn sich der Motor kontinuierlich in eine positive Richtung bewegt:
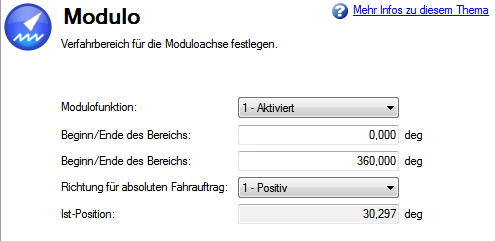
Konfiguration der Modulo-Achse in WorkBench
Sie können die Modulo-Achse in der Modulo-Ansicht in WorkBench konfigurieren.
| Schaltfläche / Feld | Beschreibung |
|---|---|
|
Modulo Position |
Freigabe oder Deaktivierung von Modulo (PL.MODPEN) |
|
Beginn/Ende des Modulobereichs |
Legt Beginn und Ende des Modulo-Bereichs fest (PL.MODP1 , PL.MODP2 ). |
|
Richtung für absoluten Fahrauftrag |
Legt die Richtung eines absoluten Fahrauftrags bei aktivierter Modulo-Funktion fest. Die Richtung kann auf immer positiv oder immer negativ eingestellt werden. Der Modus „Kürzeste Distanz“ legt die kürzeste Distanz zum Zielpunkt und die Bewegung in diese Richtung fest. Der Modus „Im Bereich“ erzeugt eine Bewegung in die Richtung, die es dem Motor erlaubt, innerhalb des definierten Skalenbereichs zu bleiben, sodass es zu keinem Überlauf kommt. Der Modus „Kürzeste Distanz“ wird häufiger verwendet als der Modus „Im Bereich“. (PL.MODPDIR) |
|
Position Feedback |
Lesen und Anzeige der Positionsrückführung (PL.FB ) |
Konfiguration der Modulo-Achse über das Terminal
Sie können folgende Parameter verwenden, um die Modulo-Achsfunktion zu konfigurieren:
- PL.MODPEN: Aktiviert oder deaktiviert die Modulo-Achsfunktion.
- PL.MODP1 : Definiert je nach Einstellung von PL.MODP2 entweder den Beginn oder das Ende des Modulo-Bereichs.
- PL.MODP2 Definiert je nach Einstellung von PL.MODP1 entweder den Beginn oder das Ende des Modulo-Bereichs.
Von der Modulo-Achse betroffene Parameter
Die folgenden Parameter werden in das Modulo-Format umgewandelt, wenn ihre Werte von einem Anwender
- PL.FB : Die Ist-Position des Servoverstärkers wird gemäß Modulo-Skalierung konvertiert.
- PL.CMD : Die Soll-Position des Servoverstärkers wird gemäß Modulo-Skalierung konvertiert.
- CAP0.PLFB (CAP0.PLFB, CAP1.PLFB ): Die vom Erfassungssystem (Capture Engine) 0 erfasste Ist-Position des Servoverstärkers wird gemäß Modulo-Skalierung konvertiert.
- CAP1.PLFB (CAP0.PLFB, CAP1.PLFB ): Die vom Erfassungssystem (Capture Engine) 1 erfasste Ist-Position des Servoverstärkers wird gemäß Modulo-Skalierung konvertiert.
Von der Modulo-Achse betroffene Servoverstärker-Funktionen
Software-Endschalter
Die Software-Endschalter im Servoverstärker vergleichen die Ist-Position (PL.FB ) mit den Schwellwerten. Die Bewegung wird gestoppt, sobald die Ist-Position die Software-Grenzwerte überschreitet. Da PL.FB von der Modulo-Achsfunktion betroffen ist, überwachen die Software-Endschalter den gemäß Modulo-Skalierung konvertierten PL.FB-Wert. Software-Endschalter mit Grenzwerten außerhalb des Modulo-Bereichs begrenzen niemals die Bewegung.
Programmierbarer Endschalter
Die programmierbaren Endschalter vergleichen die Ist-Position (PL.FB ) mit wählbaren Grenzwerten.Wenn die Ist-Position derzeit zwischen diesen Positionsgrenzwerten liegt, werden die Status-Flags auf „True“ gesetzt. Die programmierbaren Endschalter überwachen den gemäß Modulo-Skalierung konvertierten PL.FB-Wert. Programmierbare Endschalter, die auf Werte außerhalb des Modulo-Bereichs eingestellt sind, werden niemals aktiv.
Digitale Ausgangsmodi 5 und 6
Die digitalen Ausgangsmodi 5 und 6 (Position größer als x, Position kleiner als x) vergleichen die Ist-Position des Servoverstärkers mit Grenzwerten und aktivieren die zugehörigen Ausgänge, wenn PL.FB unter oder über dem Grenzwert liegt. Die Funktion für digitale Ausgangsmodi überwacht den gemäß Modulo-Skalierung konvertierten PL.FB-Wert. Positionsgrenzwerte, die auf einen Wert außerhalb des Modulo-Bereichs eingestellt sind, aktivieren oder deaktivieren kontinuierlich den Digitalausgang.
Fahraufträge für absolute Zielpositionen
Bei aktivierter Modulo-Funktion gehen absolute Fahraufträge davon aus, dass der Befehl Modulo-konvertiert ist. Absolute Fahraufträge für Zielpositionen außerhalb des Modulo-Bereichs geben eine Warnmeldung aus, nFehler und Warnmeldungen.(Zielposition des Fahrauftrags ist außerhalb des Modulo-Bereichs.)
Analoger Eingang
Wenn Modulo aktiviert ist, wird der analoge Positionseingangswert in einen Positionswert innerhalb des aktuellen Modulobereichs umgewandelt. Wenn die Position durch das analoge Eingangssignal geändert wird, fährt der Antrieb immer die kürzeste Entfernung zur neuen Position.
Verwendung der Modulofunktion mit Multiturn-Encodern
Die folgende Ereigniskombination stellt einen Sonderfall dar:
- Der Servoverstärker ist an ein Multiturn-Feedback angeschlossen.
- Die Modulo-Achsfunktion ist aktiviert.
- Der gewählte Modulo-Bereich passt nicht als Ganzzahl in den Bereich des Multiturn-Feedback .
- Die Anwendung bewegt sich über die Gesamtzahl der Umdrehung des Multiturn-Feedback hinaus. In diesem Fall tritt ein Problem auf, weil der Multiturn-Feedback Überlauf und ein Modulo-Bereich Position Rollover Punkt nicht an exakt derselben Position erscheinen.
-
- Wenn FB1.EXTENDEDMULTITURN = 1 ist, kann die absolute Position wiederhergestellt werden, auch wenn Modulo Position aktiviert ist.
Nach dem Einschalten des Servoverstärkers wird die Ist-Position (PL.FB ) vom Multiturn-Feedback ausgelesen. Diese Position kann als eine Position innerhalb des Feedbackbereichs betrachtet werden, wie in den Abbildungen unten gezeigt.
Die nachstehende Abbildung zeigt das Verhalten des Servoverstärkers für den Fall, dass der Modulo-Bereich als Ganzzahl ins Multiturn-Feedback passt. Nehmen wir zur Vereinfachung an, dass ein Multiturn-Feedback 4 Feedback-Umdrehungen umfasst und dass der gewählte Modulo-Bereich auf 2 Feedback-Umdrehungen eingestellt ist.
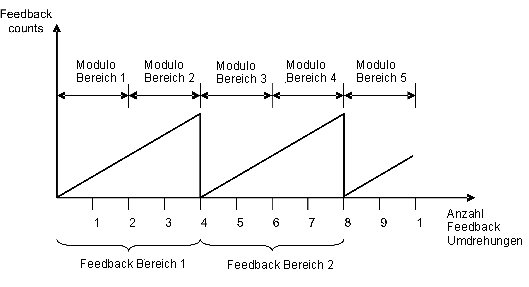
Wie in der Abbildung oben veranschaulicht, wird der gewählte Modulo-Bereich des Servoverstärkers an exakt dem Punkt wiederholt, an dem das angeschlossene Multiturn-Feedback überläuft (Modulo-Bereich 1, 3, 5…). Die Bewegung kann sich über mehrere Bereiche des Multiturn-Feedback erstrecken, und der Servoverstärker kann nach einem Aus- und Wiedereinschalten der Stromversorgung die Modulo-Position korrekt neu berechnen. Die Positionen innerhalb der Modulo-Bereiche stellen denselben Wert im Modulo-Format für die einzelnen Feedbackbereiche dar.
Beispiel
Die Modulo-konvertierte Position, die 5 oder 9 Umdrehungen des Feedback darstellt, entspricht der Modulo-Position, die 1 Umdrehung des Feedback darstellt.
Die nächste Abbildung zeigt das Verhalten des Servoverstärkers für den Fall, dass der Modulo-Bereich nicht als Ganzzahl ins Multiturn-Feedback passt. Nehmen wir zur Vereinfachung an, dass ein Multiturn-Feedbackbereich 4 Feedback-Umdrehungen umfasst und dass der gewählte Modulo-Bereich auf 2,5 Feedback-Umdrehungen eingestellt ist.
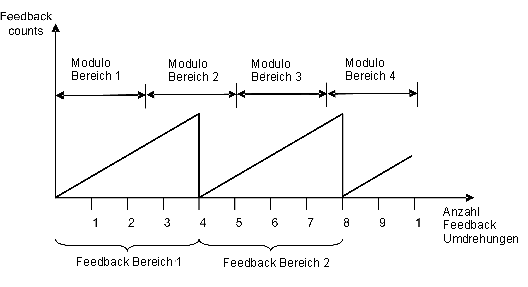
Wie in der Abbildung oben gezeigt, wird der gewählte Modulo-Bereich nicht an exakt derselben Stelle wiederholt, an der das angeschlossene Feedback überläuft. Die Bewegung kann sich über mehrere Bereiche des Multiturn-Feedback erstrecken, aber der Servoverstärker kann nach einem Aus- und Wiedereinschalten der Stromversorgung die Modulo-Position nicht korrekt neu berechnen.
Beispiel
Die Modulo-konvertierte Position, die 5 Umdrehungen des Feedback darstellt, entspricht nicht der Modulo-Position, die 1 Umdrehung des Feedback darstellt.







