









EtherCAT
and Safety over EtherCAT
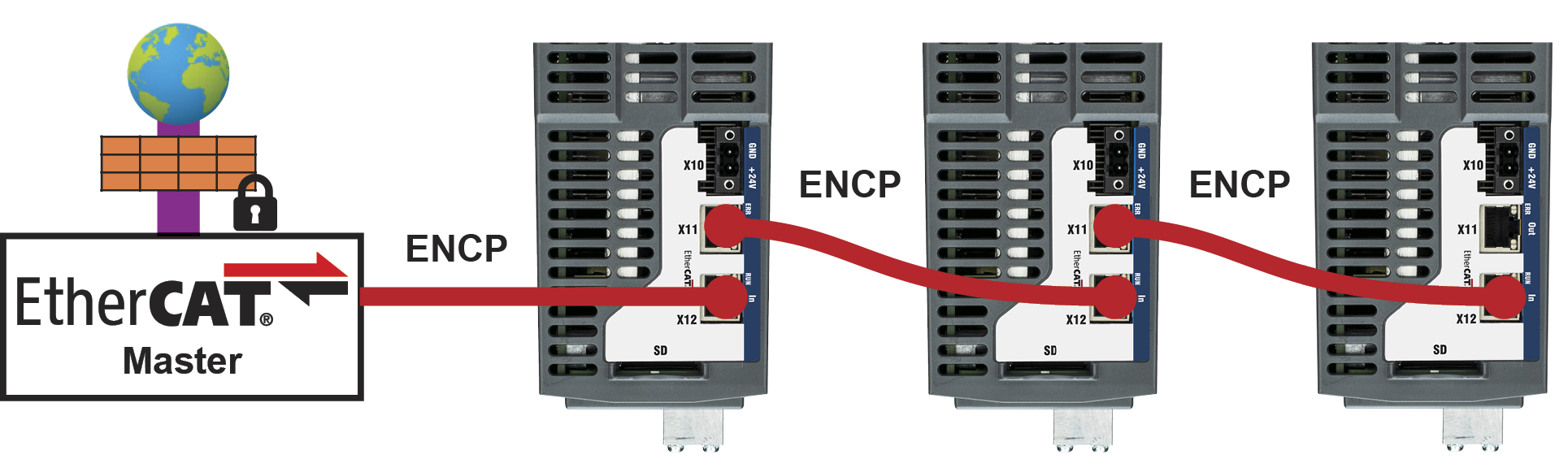
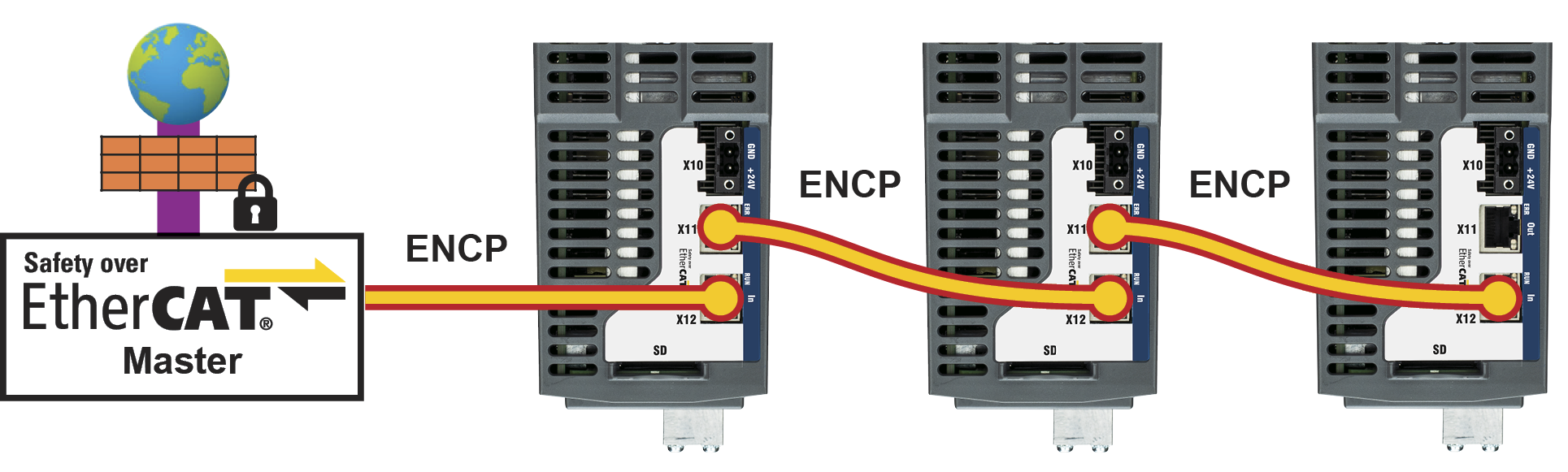
AKD2G drives (connectivity option E) can be connected as slaves to the EtherCAT network (CoE) by using RJ45 connectors X11 (out port) and X12 (in port). The communication status is indicated by the built-in connector LEDs.
|
Connector |
Name |
Function |
|
|---|---|---|---|
|
|
X11 "Out" |
"ERR" |
Returns potentials communication failures: Off = No Error |
|
X11 "Out" |
Link/ |
On/Blinking: Physical link/Data Traffic on. |
|
|
X12 "In" |
"RUN" |
Returns the device state: Off = INIT |
|
|
X12 "In" |
Link/ |
On/Blinking: Physical link/Data Traffic on. |
Bus topology example (EtherCAT)
We suggest to use Kollmorgen ENCP cables.
Communication profile
For EtherCAT communication profile description refer to the manual "AKD2G EtherCAT Communication".





