FSoE
|
|
AKD2G drives (connectivity option E) are connected as slaves to the EtherCAT network by using RJ45 connectors X11 (out port) and X12 (in port). |

- Interface details, see EtherCAT and Safety over EtherCAT
- FSoE address setting, see FSoE Node Address
- FSoE drive profile, see AKD2G EtherCAT Manual
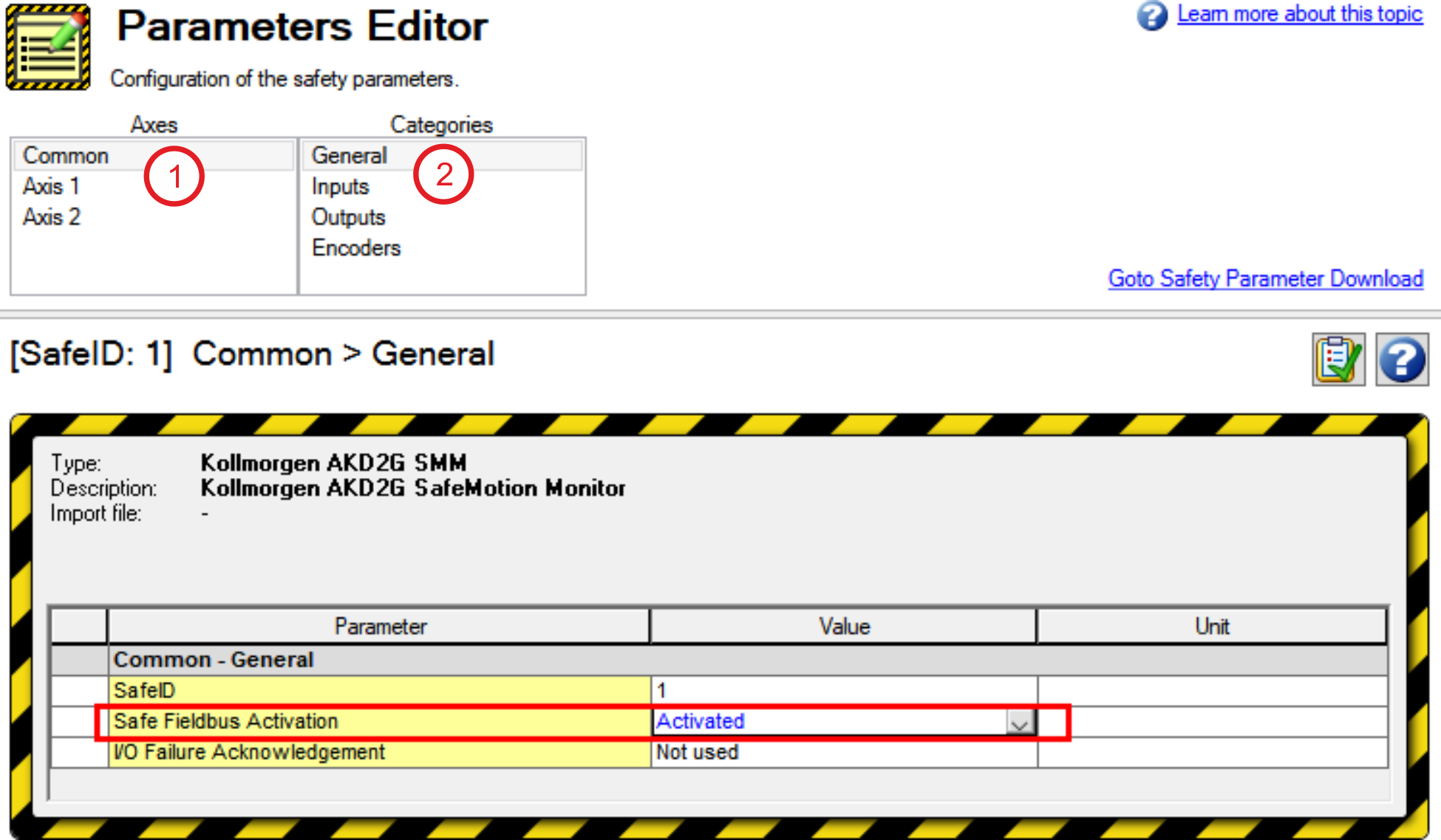
- Activation of FSoE for safety functions, see (see "SAFEPARAM.SAFEFIELDBUS.ACTIVATION")
- Parameter download through FSoE, see Downloading Safety Parameter Packages via FoE
|
|
|

The SMM implements an FSoE slave with a single endpoint per axis. The SMM implements the FSoE drive profile and supports fixed data structures for the safe fieldbus only. If configured, the software inverts the error bit of the FSoE status word at the associated safe digital output. The output is off if the error bit is set.
The software of the SMM responds to FSoE Messages within 2 ms after receiving the messages by using the Safe Fieldbus Interface. For examples of response time calculation depending on the safety function combination see Safety Function Response Time Calculation.
The SMM software receives the following data in the parameter state of the FSoE Protocol:
- The checksum of the parameters and the drive type identification.
With this the software uses this checksum to validate the parameters received by using CoE. - No parameter block or a zero checksum (without other parameter).
With this the software uses the parameters transmitted by using other means.
The required data to create the EtherCAT Slave Information file (.ESI file) are provided, including the safety parameters for the transmission by using the safe fieldbus.
| FSoE telegram frame RxPDO | FSoE telegram frame TxPDO |
|---|---|
|
Size per frame per axis is 88 bits resulting in a total of 176 bits (22 bytes) for both axes. |
Size per frame per axis is 248 bits resulting in a total of 496 bits (62 bytes) for both axes. |
Related Parameters
| Name |
Default |
Parameter |
|---|---|---|
|
Activation for safety functions |
0 |
|
|
Application parameter length |
- |
|
|
Communication parameter length |
- |
|
|
Connection ID |
- |
|
|
Connection type (Slave) |
- |
|
|
Protocol Version |
- |
|
|
FSoE address |
- |
|
|
Safety-related application CRC |
- |
|
|
Command word send by master |
- |
|
|
Actual watchdog time |
100 ms |
Activate FSoE in WorkBench
Select the Parameters Editor view (see "WorkBench Safety Function Setup"). Choose Common (1) and General (2).