AXIS#.MOTOR.IMTR
Description
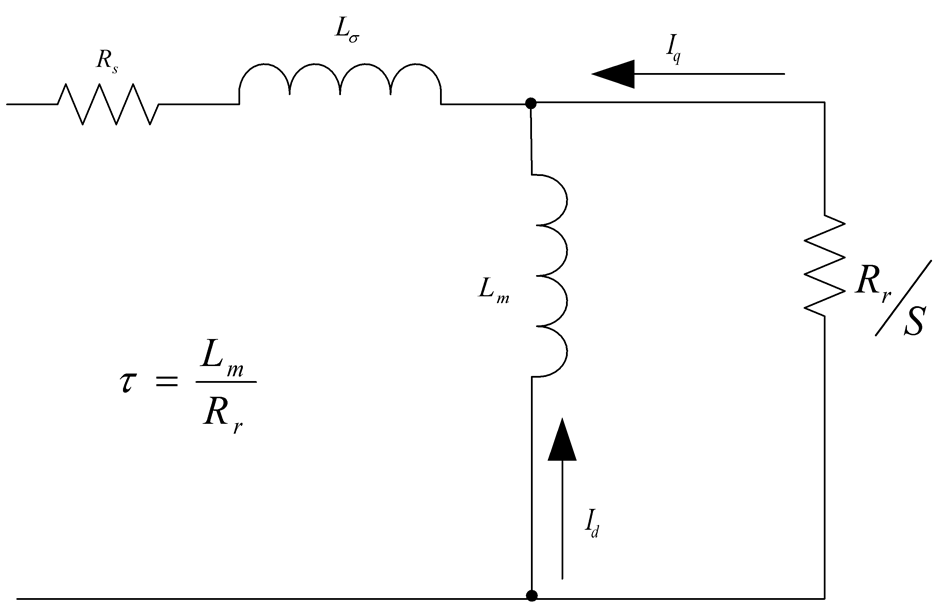
This parameter is the rotor time constant for closed loop induction motor control (AXIS#.MOTOR.TYPE = 4).
The rotor time constant is calculated as the ratio between rotor magnetizing inductance Lm and rotor resistance Rr from the following equivalent circuit of an induction machine.
Alternatively, the rotor time constant can be estimated from the rated current, magnetizing current (AXIS#.MOTOR.IMID) and rated slip frequency as follows:
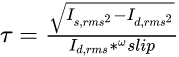
where Is,rms is the rated current, Id,rms is the rated magnetizing current, and ωslip is the rated slip frequency in rad/s.
-
-
τ is in seconds for the above formulas. It needs to converted to ms for the AXIS#.MOTOR.IMTR setting:
AXIS#.MOTOR.IMTR(ms) = τ*1000
-
-
This parameter is required to be configured for AXIS#.MOTOR.TYPE = 4
Context
For more information see Motor.
Versions
| Action | Version | Notes |
|---|---|---|
| Implemented | 02-00-00-000 |
General Information
|
Type |
Read/Write |
|
Units |
Ms |
|
Range |
1 to 16,000 |
|
Default Value |
100 |
|
Data Type |
Integer |
|
Stored in Non-Volatile Memory |
Yes |
Variants Supported
All variants are supported.
Industrial Ethernet Information
|
Command |
Index |
SubIndex |
Data Type |
Units |
Float Scale |
Access |
PDO Mappable |
|---|---|---|---|---|---|---|---|
|
AXIS1.MOTOR.IMTR |
500bh |
09h |
Unsigned16 |
- |
- |
Read/Write |
No |
|
ID |
Instance |
Attribute |
Name |
Data Type |
Access |
User Mappable |
|---|---|---|---|---|---|---|
|
6228 |
1 |
6228 (0x1854) |
AXIS1.MOTOR.IMTR |
Unsigned16 |
Read/Write |
Yes |
|
Parameter |
PNU |
Data Type |
Access |
Units |
|---|---|---|---|---|
|
AXIS1.MOTOR.IMTR |
6228 |
Unsigned16 |
Read/Write |
- |





