 ECATWCStatusECATWCStatus
ECATWCStatusECATWCStatusThis function returns the current number of working counter errors for the Sync unit. The working counter errors are cleared to zero when the EtherCATEtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network is taken from Init to OP state.
Figure 11-186: ECATWCStatus function
| SyncUnit | Description | Sync Unit Index (for future compatibility with multiple frames) |
| Data type | INT | |
| Range | 0 | |
| Unit | n/a | |
| Default | - |
| Count | Description | Working Counter error |
| Data type | UDINT | |
| Unit | n/a |
ECATDeviceStatus, ECATMasterStatus
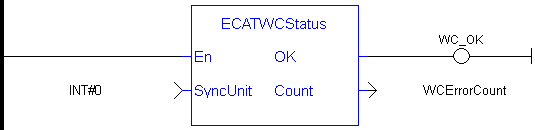
(********************************************************)
(* read Ethercat Working counter value *)
(********************************************************)
wcErrorCounter := ECATWCStatus( 0 );

|
Stay Connected with Kollmorgen       
|
Copyright © 2015 Kollmorgen™ |
|
 [Top]
[Top]