 MC_AxisSetDefaults
MC_AxisSetDefaults

Description
MC_AxisSetDefaults sets the default kinematic variables for MC_MoveDirAbs and MC_MoveDirRel. These variables are only used with the MC_MoveDir function blocks.
Each axis within the group must have the default kinematic parameters of Velocity, Acceleration, Deceleration, and JerkIn physics, jerk is the rate of change of acceleration; more precisely, the derivative of acceleration with respect to time set to values greater than zero. A non-zero Jerk value will perform an S-Curve rather than a trapezoidal move. Each axis within the group must have these values set before a direct move can be started.
-
- Jerk with a non-zero value is currently not supported for coordinated motion. Jerk parameters are currently ignored.
The function block returns an error if the group state is not GroupStandby or GroupDisabled.
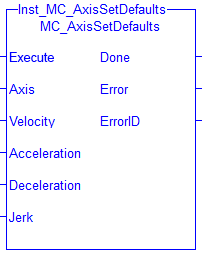
Figure 10-172: MC_AxisSetDefaults
-
- This function block starts a motion-related action and therefore stores data for calculations and error checking. Please see Calling Function Blocks Multiple Times in the Same Cycle if you are using a dual-core controller.
Related Functions
MC_MoveDirAbs, MC_MoveDirRel, MC_ErrorDescription
Coordinated Motion, the top-level topic for Coordinated Motion.
See also:
Arguments
Input
| Execute | Description | On the rising edgeA rising edge is the transition of a digital signal from low to high. It is also called positive edge, request to set the default kinematic parameters. |
| Data type | BOOL | |
| Range | 0, 1 | |
| Unit | n/a | |
| Default | — | |
| Axis | Description | Reference to the axis which will have its default kinematic parameters set. |
| Data type | AXIS_REF | |
| Range | — | |
| Unit | n/a | |
| Default | — | |
| Velocity | Description | The default velocity. |
| Data type | LREAL | |
| Range |
0 < Velocity < ( 20 * Acceleration ) and 0 < Velocity < ( 20 * Deceleration) See Limitations on Acceleration and Jerk for more information. |
|
| Unit | User units per second | |
| Default | — | |
| Acceleration | Description |
Trapezoidal: Acceleration rate see "Selection of Acceleration and Jerk Parameters for Function Blocks" |
| Data type | LREAL | |
| Range |
( Velocity / 20 ) < Acceleration < ( 2 * Jerk ) See Limitations on Acceleration and Jerk for more information. |
|
| Unit | User units per second2 | |
| Default | — | |
| Deceleration | Description |
Trapezoidal: Deceleration rate |
| Data type | LREAL | |
| Range | ( Velocity / 20 ) < Deceleration < ( 2 * Jerk ) | |
| Unit | User unit per second2 | |
| Default | — | |
| Jerk | Description |
Trapezoidal: 0
see "Selection of Acceleration and Jerk Parameters for Function Blocks" |
| Data type | LREAL | |
| Range | ( Velocity / 20 ) < Acceleration < ( 2 * Jerk ) and ( Velocity / 20 ) < Deceleration < ( 2 * Jerk ) | |
| Unit | User units per second3 | |
| Default | — |
Output
| Done | Description |
If True, then the command completed successfully. |
| Data type | BOOL | |
| Error | Description | If True, then an error has occurred |
| Data type | BOOL | |
| ErrorID | Description | Indicates the error if Error output is set to TRUE. See the table in PLCopen Function Block ErrorID Output. |
| Data type | DINT |
Example
Structured Text
(* ST"Structured text" A high-level language that is block structured and syntactically resembles Pascal MC_AxisSetDefaults Example *) default_velocity := 50.0; default_acceleration := 250.0; default_deceleration := 300.0; default_jerk := 1000.0; Inst_MC_AxisSetDefaults ( TRUE, CoordAxis1_ref, default_velocity, default_acceleration, default_deceleration, default_jerk);
Instruction List
BEGIN_IL"Instruction list" This is a low-level language and resembles assembly CAL Inst_MC_AxisSetDefaults( TRUE, CoordAxis1_Ref, default_velocity, default_acceleration, default_deceleration, default_jerk) END_IL
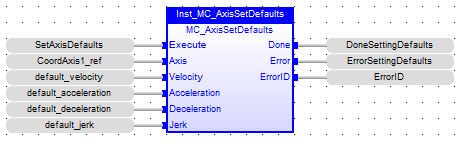
Function Block Diagram
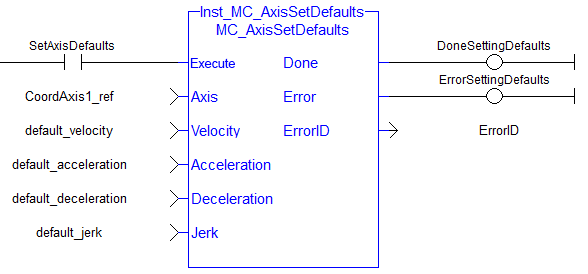
Ladder Diagram
|
Stay Connected with Kollmorgen       
|
Copyright © 2018 Kollmorgen |
|