Description
This parameter selects the feedback source that current loop uses for commutation angle calculation. It applies only when MOTOR.TYPE = 4.
0 = Primary feedback
1 = Secondary feedback
2 = Tertiary feedback
When IL![]() "Instruction list"
This is a low-level language and resembles assembly.FBSOURCE is changed, MOTOR.POLES and MOTOR.PHASE are updated.
"Instruction list"
This is a low-level language and resembles assembly.FBSOURCE is changed, MOTOR.POLES and MOTOR.PHASE are updated.
| IL.FBSOURCE | MOTOR.PHASE is set to: | MOTOR.POLES is set to: |
|---|---|---|
| 0 | FB1.MOTORPHASE | FB1.MOTORPOLES |
| 1 | FB2.MOTORPHASE | FB2.MOTORPOLES |
| 2 | FB3.MOTORPHASE | FB3.MOTORPOLES |
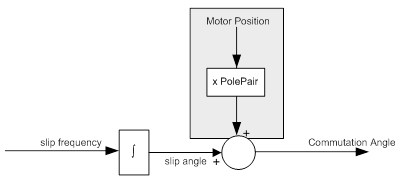
For induction motor closed loop control the commutation angle is set as shown in the following figure.
General Information
|
Type |
R/W |
|
Units |
N/A |
|
Range |
0 to 2 |
|
Default Value |
0 |
|
Data Type |
Integer |
|
Start Version |
M_01-08-00-000 |
|
Index/Subindex |
Object Start Version |
|
|---|---|---|
|
5361h/0 |
M_01-08-00-000 |
Related Topics







