 MC_GrpReadActVel
MC_GrpReadActVel

Description
MC_GrpReadActVel fills the array specified by the ‘Velocity’ argument with the actual velocity of the system in the coordinate system specified by the CoordSystem argument. The measured path velocity is also calculated and reported via the 'PathVelocity' output. This function block does not cause any motion.
-
-
- The actual velocity is smoothed over the last 10 samples. This reduces the error in velocity estimation, but introduces a small amount of phase delay in the reported velocities.
- Currently, only the ACS coordinate system is supported. See Coordinate Systems to learn more.
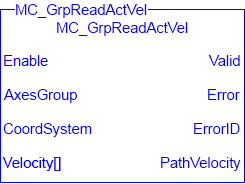
Figure 7-166: MC_GrpReadActVel
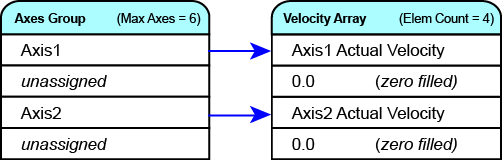
There is a one to one correspondence between the axes in the Axes Group and the velocity values in the Velocity Array. Each element in the Velocity array corresponds to the axis element in the Axes Group array. If a index in the Axes Group is unassigned then the velocity value for that array element in the Velocity array will be 0. If the element does contain an axis then the velocity value will be filled with the current actual velocity for that axis. Here is an example to illustrate how this works:
-
-
This function or function block returns cached data. See Programming a Dual Core Controller for more information.
Related Functions
MC_GrpReadActPos, MC_GrpReadActAcc, MC_GrpReadCmdPos, MC_GrpReadCmdVel
Coordinated Motion, the top-level topic for Coordinated Motion.
Arguments
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules.
Input
| Enable | Description | If True, then this function block will read the current actual velocity of the group and the axes in the group |
| Data type | BOOL | |
| Range | 0, 1 | |
| Unit | N/A | |
| Default | — | |
| AxesGroup | Description | The axes group from which the actual velocity will be read |
| Data type | AXES_GROUP_REF | |
| Range | N/A | |
| Unit | N/A | |
| Default | — | |
| CoordSystem | Description | The coordinate system used when reading the actual velocity |
| Data type | SINT | |
| Range |
One of the following enumeration values:
|
|
| Unit | N/A | |
| Default | — | |
| Velocity[] | Description | An array where the velocity data will be written. The length of the array must equal the maximum number of axes allowed in the group. The maximum number of axes is an argument to MC_CreateAxesGrp that is used to create axes groups. |
| Data type | LREAL | |
| Range | N/A | |
| Unit | User units per second | |
| Default | — |
Output
| Valid | Description | If true, the velocities have been read without error. |
| Data type | BOOL | |
| Error | Description | If true, an error has occurred. |
| Data type | BOOL | |
| ErrorID | Description | Indicates the error if Error output is set to TRUE. See the table PLCopen Function Block ErrorID Output |
| Data type | INT | |
| PathVelocity | Description | The current measured path velocity of the group, measured by taking the square root of the sum of the squared velocities of each axis. |
| Data type | LREAL | |
| Unit | User units per second |
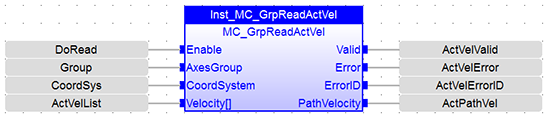
Example
Structured Text
Inst_MC_GrpReadActVel(DoRead, Group, CoordSys, VelList);
IL
BEGIN_IL "Instruction list"
This is a low-level language and resembles assembly
CAL Inst_MC_GrpReadActVel(DoRead, Group, CoordsSys, VelList)
END_IL
"Instruction list"
This is a low-level language and resembles assembly
CAL Inst_MC_GrpReadActVel(DoRead, Group, CoordsSys, VelList)
END_IL
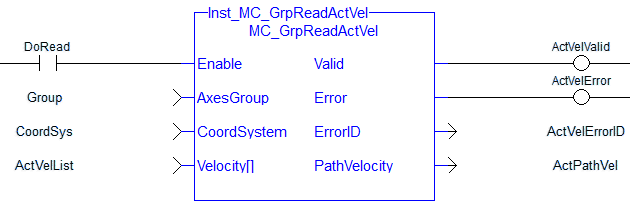
FBD
FFLD
 [Top]
[Top]





