 MC_CreatePLCAxis
MC_CreatePLCAxis
Description
![]() A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML Axis. A call to this function is automatically generated when the application is compiled, based on the data entered in the PLCopen Axis Data dialog.
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML Axis. A call to this function is automatically generated when the application is compiled, based on the data entered in the PLCopen Axis Data dialog.
-
-
MC_CreateAxis must be called between MLMotionInit and MLMotionStart.
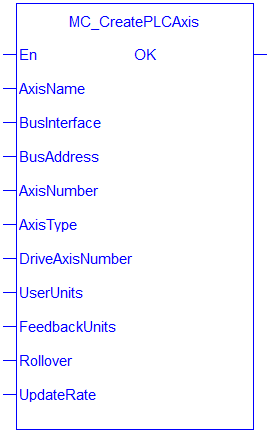
Figure 7-121: MC_CreatePLCAxis
Arguments
For more detail on how inputs and outputs work, refer to PLCopen Function Blocks - General Rules
Input
| En | Description | Requests to create a PLCopen axis | |||||||||
| Data type | BOOL | ||||||||||
| Range | 0, 1 | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| AxisName | Description | Axis name | |||||||||
| Data type | STRING | ||||||||||
| Range | — | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| BusInterface | Description | Bus interface identifier: “EtherCATDriver” = EtherCAT “MSBusDriver” = KAS Simulator interface |
|||||||||
| Data type | STRING | ||||||||||
| Range | — | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| BusAddress | Description | Address of the drive on the bus | |||||||||
| Data type | DINT | ||||||||||
| Range | bus dependent | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| AxisNumber | Description | Axis number | |||||||||
| Data type | UINT | ||||||||||
| Range | [1,256] | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| AxisType | Description |
|
|||||||||
| Data type | USINT | ||||||||||
| Range | [0,1] | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| DriveAxisNumber | Description | This one-based number specifies the axis on the drive. For a single-axis drive this number should be 1. |
|||||||||
| Data type | UINT | ||||||||||
| Range | [1,256] | ||||||||||
| Unit | N/A | ||||||||||
| Default | — | ||||||||||
| UserUnits | Description | User unit portion of the user unit/feedback unit ratio | |||||||||
| Data type | DINT | ||||||||||
| Range | [1, 2147483647] | ||||||||||
| Unit | User unit | ||||||||||
| Default | — | ||||||||||
| FeedbackUnits | Description | Feedback unit portion of the user unit/feedback unit ratio | |||||||||
| Data type | DINT | ||||||||||
| Range | [1, 2147483647] | ||||||||||
| Unit | Feedback units | ||||||||||
| Default | — | ||||||||||
| Rollover | Description | Rollover position (0 = no rollover) | |||||||||
| Data type | LREAL | ||||||||||
| Range | [0, 4294967296] | ||||||||||
| Unit | User unit | ||||||||||
| Default | — | ||||||||||
| UpdateRate | Description | Servo update rate (0, 1, and 2 are reserved for future enhancements) 3 = 125 μsec 4 = 250 μsec 5 = 500 μsec 6 = 1 msec 7 = 2 msec 8 = 4 msec 9 = 8 msec |
|||||||||
| Data type | UINT | ||||||||||
| Range | [3,9] | ||||||||||
| Unit | N/A | ||||||||||
| Default | — |
Output
| OK | Description |
Indicates the axis has been created See more details here. |
| Data type | BOOL |
Example
Structured Text
(* MC_CreatePLCAxis ST"Structured text" A high-level language that is block structured and syntactically resembles Pascal Example *)
AxisName1 := 'PLCOpenAxis1';
BusName1 := 'EtherCATDriver';
BusAddress1 := 1001;
AxisNumber1 := 1;
AxisType1 := MC_AXIS_TYPE_SERVO_STEPPER;
DriveAxisNumber1 := 1;
UserUnits1 := 360;
FeedbackUnits1 := 1048576;
Rollover1 := 0;
UpdateRate1 := 3;
MC_CreateAxis(AxisName1, BusName1, BusAddress1, AxisNumber1, AxisType1, DriveAxisNumber1, UserUnits1, FeedbackUnits1, Rollover1, UpdateRate1);
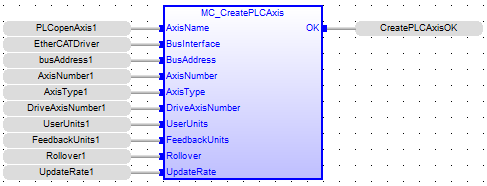
Function Block Diagram
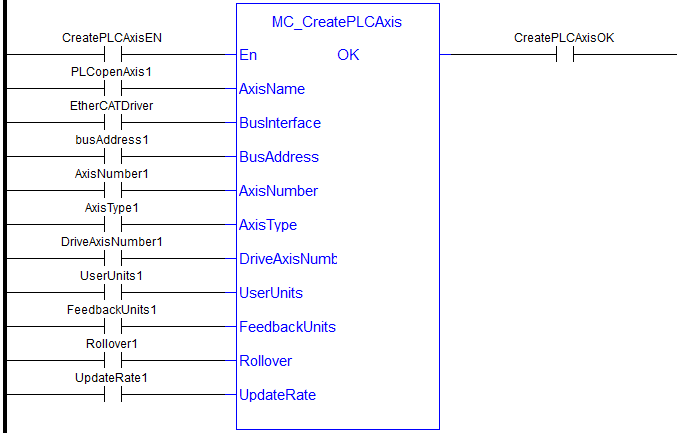
Ladder Diagram
 [Top]
[Top]





