 MLPmpInit
MLPmpInit
Description
Initializes a Pmp Block for use in a PLC![]() "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events Program. This function block is automatically called by the Function
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events Program. This function block is automatically called by the Function![]() A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. PipeNetwork(MLPN_CREATE_OBJECTS) if a Pmp Block is added to the Pipe Network, with user-defined settings entered in the Pipe Blocks Properties screen.
A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. PipeNetwork(MLPN_CREATE_OBJECTS) if a Pmp Block is added to the Pipe Network, with user-defined settings entered in the Pipe Blocks Properties screen.
The Pmp Pipe Block is assigned a Name, SAMPLING_PERIOD, MODULO_POSITION, FIRST_TRAVEL_SPEED, LAST_TRAVEL_SPEED, ACCELERATION, JERK, and INITIAL Position. Some of these parameters can be changes in an application program using other MLPmp function blocks
A MLPmpRel function block is used to make a bi directional motion. First movement in one direction, then a return motion back to the initial position. A MLPmpAbs function block is use to move one direction to an absolute position.
-
-
Pmp objects are normally created in the Pipe Network using the graphical engine. Then you do not have to add MLPmpInit function blocks to their programs. Parameters are entered directly in pop-up windows, and the code is then automatically added to the current project.
Arguments
Input
| BlockID | Description | ID Name of a PMP function block in the Pipe Network |
| Data type | DINT | |
| Range | [-2147483648, 2147483648] | |
| Unit | N/A | |
| Default | — | |
| ModuloPosition | Description | Modulo Position for cyclic motion systems expressed in user logical units (Position Rollover Value) |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit | |
| Default | 360.0 | |
| Period | Description | Sampling period of the generator expressed according to the update cycle (e.g. 2.0 means the sampling is done once every 2 cycles) |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit | |
| Default | 1.0 | |
| FirstTravelSpeed | Description | First Travel Speed of the motion |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec | |
| Default | 100.0 | |
| LastTravelSpeed | Description | Last Travel Speed of the motion |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec | |
| Default | 100.0 | |
| Acceleration | Description | Acceleration of the Pmp block motion |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec2 | |
| Default | 1000.0 | |
| Jerk |
Description | Jerk |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit/sec3 | |
| Default | 0 | |
| InitialPosition | Description | Initial Position of the Pmp block when the Pipe Network is start up |
| Data type | LREAL | |
| Range | — | |
| Unit | User unit | |
| Default | 0 | |
| Modulo | Description | The available modes are Modulo (True) or No modulo (False) |
| Data type | BOOL | |
| Range | 0, 1 | |
| Unit | N/A | |
| Default | — |
Output
|
Default (.Q) |
Description | Returns True if the function block is successfully executing See more details here. |
| Data type | BOOL | |
| Unit | N/A |
Related Functions
Example
Structured Text
//Initialize a PMP Pipe Block named “PMP” to a modulo roll over of 360, motion generator sample period of 1,First Travel Speed of 800.0, Second Travel Speed of 20000.0, Accel of 20000.0,Jerk of 520.0, Initial position of 0.0
MLPmpInit( PipeNetwork.Pmp , 360.0, 1.0, 800.0, 20000.0, 20000.0, 520.0, 0, true ) ;
Ladder Diagram
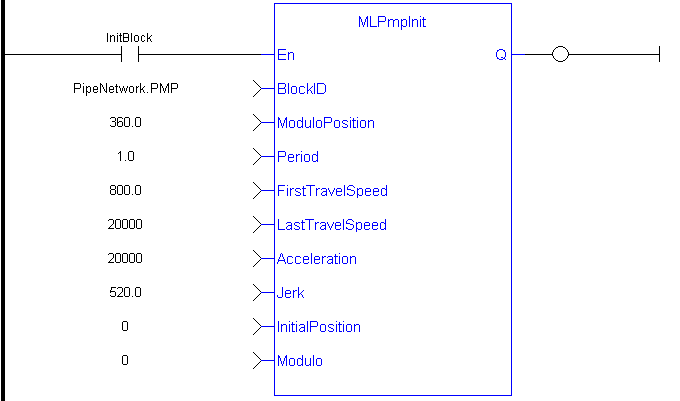
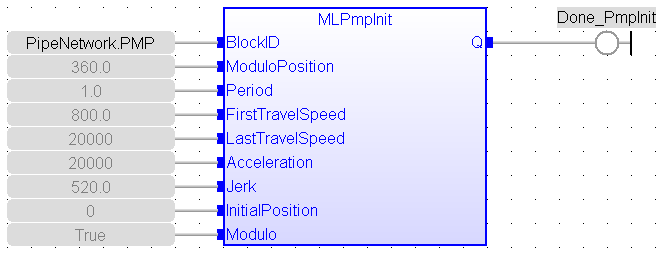
Function Block Diagram
 [Top]
[Top]





