Initialize and Start PLCopen
The Motion State Machine is driven by the IEC![]() "International Electrotechnical Commission"
IEC is a not-for-profit, non-governmental international standards organization that prepares and publishes International Standards for all electrical, electronic and related technologies 61131-3 application with the help of dedicated function blocks.
"International Electrotechnical Commission"
IEC is a not-for-profit, non-governmental international standards organization that prepares and publishes International Standards for all electrical, electronic and related technologies 61131-3 application with the help of dedicated function blocks.
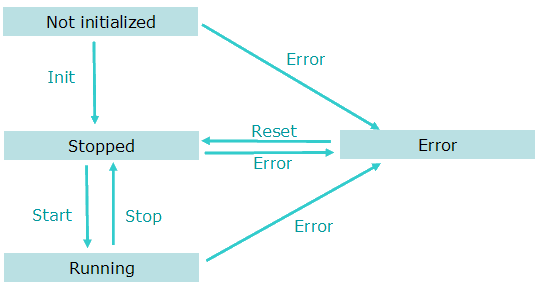
Figure 4-24: Motion State Machine
Each arrow represents a transition from one State to another one.
To start the PLCopen![]() A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML engine in your IEC 61131-3 application program, you have to perform the following steps with their respective functions:
A vendor -and product- independent worldwide association active in Industrial Control and aiming at standardizing PLC file formats based on XML engine in your IEC 61131-3 application program, you have to perform the following steps with their respective functions:
| Step | Function Calls | Description |
|---|---|---|
| Motion Init | MLMotionInit | Initialization of the Motion is done with this dedicated function Set the Motion engine update rate. Wait for acknowledgement: MLMotionStatus() = MLSTATUS_INITIALISED to continue program operation |
| Create Cam Profiles | Profiles(MLPR_CREATE_PROFILES); | Create Cam Profiles from cam files |
| Create/Initialize PLCopen Axes | PLCopen (0); | Create and initialize PLCopen axes from the PLCOpenCode attached to the PLCopen node in the Project tree. To view the PLCOpenCode, right click on the PLCopen node and select Show Compiled Code. |
| Motion Start | MLMotionStart | Starts the motion engine, motion bus driver, and initializes EtherCAT MLMotionStatus() = MLSTATUS_RUNNING to continue program operation |
For more details on all ML function blocks related to motion, Motion Library






