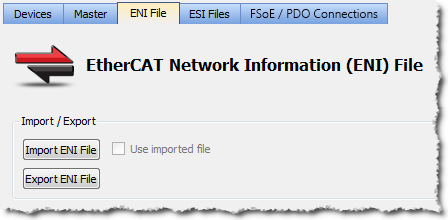
ENI File Tab
During the compilation, the KAS IDE![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger generates the ENI (EtherCAT
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger generates the ENI (EtherCAT![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Network Information) file based on the EtherCAT devices defined in your project.
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Network Information) file based on the EtherCAT devices defined in your project.
| Item | Description |
|
Enables you to browse and select an ENI file to be imported. If the file is successfully imported into the project, the Use imported file option is automatically selected. This enables you to include EtherCAT devices in your project that are not natively supported by KAS. For more details, refer to Add Unsupported EtherCAT Device . |
|
|
Use imported ENI file |
Allows you to specify whether or not to use the imported ENI file. |
|
Enables you to export the ENI file generated by the KAS IDE. You can specify the name and directory for the file. Only the logical devices in the project tree that are mapped to a physical device (and not simulated) are taken into account when generating the ENI file. This export can be useful if you want to use the file in another context or with another program. |
Table 4-26: ENI File - Form Description
-
-
Importing an external ENI file overrides all EtherCAT project device information and configuration settings in the IDE. The following views and configurations are not applicable when using an imported ENI file:
- Project View: All devices located under the EtherCAT node
- EtherCAT Device View tabs:
- General Properties
- PDO
 PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. Selection/Mapping
PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. Selection/Mapping - Distributed Clock
- CoE Init-Commands
- Slice I/O Properties
- Mapping PLC"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events Variables to Slice I/O or PDO objects
Information displayed in the views may not match the imported ENI file.
Using an Imported ENI file
- The KAS IDE works in a degraded mode when using an imported ENI file, and the Mapped to Axis settings are disabled. This is because the information about the devices in the project tree and the EtherCAT widget table is no longer relevant.
- When using an imported configuration file the following parameters must be manually set for each axis:
- the type of motion bus
- its address on the fieldbus ring
This is done by right-clicking on the Axis Pipe Block and selecting the Properties command.
- Scan Devices must be run from EtherCAT Devices before downloading the application to the controller.






