 Feedback Devices
Feedback Devices
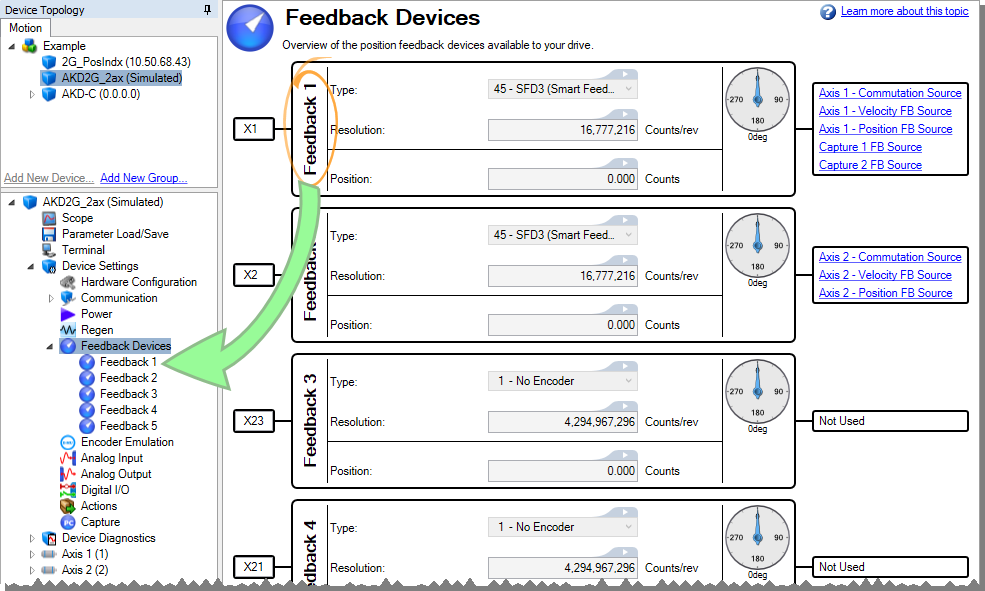
There are two views which allow you to configure your position feedback devices and provide information about them. The Feedback Devices view provides up-to-date data about the devices. Clicking on the feedback number field opens a Feedback View to configure it.
Overview
The AKD2G offers a variety of feedback solutions which allow you to optimize your system based on your specific machine needs. The table below lists the currently supported feedback types with associated connector/feedback ID. Your motor model number will indicate the type of feedback that you have.
Kollmorgen motors with digital feedback devices (such as SFD, EnDat, BiSS![]() "Bi-directional Serial Synchronous interface"
An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder, HIPERFACE and, Tamagawa) are plug and play. With these motors, all feedback and motor settings are configured automatically. Third party motors, or Kollmorgen motors with non-digital feedback types, require that parameters to be entered manually. See Non-Plug and Play Feedback Devices.
"Bi-directional Serial Synchronous interface"
An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder, HIPERFACE and, Tamagawa) are plug and play. With these motors, all feedback and motor settings are configured automatically. Third party motors, or Kollmorgen motors with non-digital feedback types, require that parameters to be entered manually. See Non-Plug and Play Feedback Devices.
| Element | Description | Parameter | |
|---|---|---|---|
| X# | Indicates the connector used for the feedback | ||
| Feedback # block | [number] | Identifies the feedback and serves as a link to the configuration view | |
| Type | Indicates the feedback type identified | FB#.IDENTIFIED | |
| Resolution | Resolution of the identified feedback | FB#.RES | |
| Position | Current position in raw feedback counts | FB#.P | |
| Graphical Indicator | Visually indicates the position of the feedback within one revolution | ||
| FB Usage | Indicates how the feedback is being used by an axis. Clicking an entry will open the view configuration. | ||
Feedback Connector Mapping
| AKD2G Feedback Connector | AKD2G Feedbacks |
|---|---|
| X1 | FB1 |
| X2 | FB2 |
| X23 | FB3 |
| X21 | FB4 |
| X22 | FB5 |
Feedback Types Supported
|
Feedback Type |
Description |
FB1 (X1) |
FB2 (X2) |
FB3 (X23) |
FB4 (X21) |
FB5 (X22) |
Plug & Play |
SFA |
|---|---|---|---|---|---|---|---|---|
|
Incremental Encoder |
With Halls and Index |
|
Yes |
|
|
No |
Yes |
|
|
No Halls with Index |
|
Yes |
|
|
Yes |
|||
|
No Halls and No Index |
|
Yes |
Yes |
Yes |
Yes |
|||
|
Step/Direction |
|
|
Yes |
Yes |
Yes |
No |
No |
|
|
CW/CCW |
|
|
Yes |
Yes |
Yes |
No |
No |
|
|
Sine Encoder |
With Digital Halls |
|
Yes |
|
|
No |
Yes |
|
|
With Digital Halls and Analog Index |
|
Yes |
|
|
Yes |
|||
|
No Halls and No Index |
|
Yes |
|
|
Yes |
|||
|
EnDat Analog |
Single and Multi-Turn |
|
Yes |
|
|
Yes |
Yes |
|
|
EnDat Digital |
All digital |
|
Yes |
|
Yes |
Yes |
Yes |
|
|
Analog/Digital |
|
Yes |
|
Yes |
Yes |
|||
|
BiSS-B Analog |
All Analog |
|
|
Yes |
|
|
|
Yes |
|
HIPERFACE |
All Analog |
|
|
Yes |
|
|
|
Yes |
|
BiSS-C Digital |
All Digital |
|
Yes |
|
Yes |
Yes |
Yes |
|
|
Resolver |
Std and Multi pole |
|
|
Yes |
|
|
No |
Yes |
|
SFD |
|
|
|
Yes |
|
|
Yes |
Yes |
|
SFD3 |
|
Yes |
Yes |
|
|
|
Yes |
No |
|
HIPERFACE DSL |
All Digital |
Yes |
Yes |
|
|
|
Yes |
No |
Smart Feedback Adapter
Kollmorgen provides an optional Smart Feedback Adapter (SFA) to allow feedback devices that normally connect to X23 (FB3) to connect through X1 (FB1) and X2 (FB2) instead. For example, on a dual axis drive requiring two resolver feedbacks, X23 could be used for one feedback and an SFA on X2 could be used for the other feedback. See Feedback Connector X41 for details on connecting SFA hardware to AKD2G.
For connections that support SFA (X1 and X2), SFA feedback types can be selected using FB#.SELECT in the same manner as other feedbacks. SFA feedback types appear as options for FB#.SELECT when the corresponding feedback connector supports SFA. For example, FB1.SELECT and FB2.SELECT show the SFA feedback types as options. See FB#.SELECT for a list of supported SFA feedback.
Commands Used for Each Feedback
| FB#.SELECT | Incremental Encoder with Halls | Incremental Encoder without Halls | Sine Encoder with Halls | Sine Encoder without Halls | EnDat Analog | EnDat Digital | BiSS-B Analog | HIPERFACE | BiSS-C Digital | Resolver | SFD | SFD3 | HIPERFACE DSL |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 11 | 20 | 21 | 30 | 31 | 32 | 33 | 34 | 40 | 41 | 45 | 46 | |
| FB1.MECHTYPE | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| FB#.SINGLETURNBITS | Y | Y (R) | |||||||||||
| FB#.MULTITURNBITS | Y | Y (R) | |||||||||||
| FB#.BITS | Y (L) | ||||||||||||
| FB#.ENCLINES | Y (R) | Y (R) | Y (R) | Y (R) | |||||||||
| FB#.LINEPITCH | Y (L) | Y (L) | Y (L) | Y (L) | Y (L) | ||||||||
| FB#.RES | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y | Y |
| FB#.HALLSTATE | Y | Y | |||||||||||
| MOTOR.MEMVER | Y | Y | Y | Y | Y | Y | |||||||
| FB#.POLES | Y | ||||||||||||
| FB#.RESKTR | Y | ||||||||||||
| FB#.RESREFPHASE | Y | ||||||||||||
| FB#.TRACKINGCAL | Y | Y | Y | Y | Y | ||||||||
| FB1.USERBYTE, FB1.USERWORD, FB1.USERDWORD | Y | Future | Future | Y | Y |
(R) = Rotary
(L) = Linear






