 MCFB_StepBlock
MCFB_StepBlock
Description
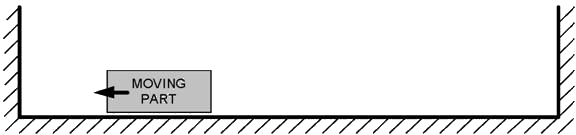
This function block performs homing against a physical object, mechanically blocking the movement. In this mode there is no limit switch or Reference Pulse![]() When the step gets activated, the action is activated for a single execution, and possibly once again when the step is deactivated. Adequate torque
When the step gets activated, the action is activated for a single execution, and possibly once again when the step is deactivated. Adequate torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist limits are required for not damaging mechanics during homing process. The StepBlock condition is that we have reached the torque limit and real velocity falls below 5% of demanded.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist limits are required for not damaging mechanics during homing process. The StepBlock condition is that we have reached the torque limit and real velocity falls below 5% of demanded.
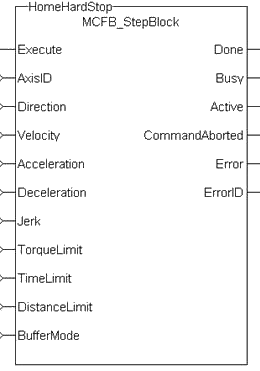
The following figure shows the function block I/O:
Arguments
Input
|
Execute |
Description |
Request the homing step procedure at rising edge |
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Range |
[0 , 1] |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
AxisID |
Description |
Name of a declared instance of the AXIS_REF library function |
||||||||||||||
|
Data type |
||||||||||||||||
|
Range |
[1 , 256] |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
Direction |
Description |
Define the axis homing direction
|
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Range |
[0 , 1] |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
Velocity |
Description |
Commanded velocity for the homing move |
||||||||||||||
|
Data type |
LREAL |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
User unit/sec |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
Acceleration |
Description |
Commanded acceleration for the homing move |
||||||||||||||
|
Data type |
LREAL |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
User unit/sec2 |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
Deceleration |
Description |
Commanded deceleration for the homing move |
||||||||||||||
|
Data type |
LREAL |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
User unit/sec2 |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
Description |
Commanded jerk |
|||||||||||||||
|
Data type |
LREAL |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
User unit/sec3 |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
TorqueLimit |
Description |
Maximum torque applied for the homing move entered in thousandths of maximum torque, e.g. "250" is 250/1000, or 25%. |
||||||||||||||
|
Data type |
LREAL |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
User unit |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
TimeLimit |
Description |
Maximum time for homing move to complete. If exceeded the homing procedure will error out. 0= no time limit |
||||||||||||||
|
Data type |
TIME |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
sec |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
DistanceLimit |
Description |
Maximum distance for homing move to complete. If exceeded the homing procedure will error out. 0= no distance limit |
||||||||||||||
|
Data type |
LREAL |
|||||||||||||||
|
Range |
— |
|||||||||||||||
|
Unit |
User unit |
|||||||||||||||
|
Default |
— |
|||||||||||||||
|
BufferMode |
Description |
Define the homing move start action
|
||||||||||||||
|
Data type |
SINT |
|||||||||||||||
|
Range |
[0 , 5] |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Default |
— |
Output
|
Done |
Description |
Indicates the move completed successfully. The Command Position has reached the endpoint |
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Busy |
Description |
High from the moment the Execute input is one-shot to the time the move is ended |
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Active |
Description |
Indicates this move is the active move |
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
CommandAborted |
Description |
Indicates the move was aborted |
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
Error |
Description |
Indicates an invalid input was specified or the move was terminated due to an error |
||||||||||||||
|
Data type |
BOOL |
|||||||||||||||
|
Unit |
N/A |
|||||||||||||||
|
ErrorID |
Description |
Indicates the error if Error output is set to TRUE
|
||||||||||||||
|
Data type |
INT |
|||||||||||||||
|
Unit |
N/A |
Usage
Homing![]() The Homing procedure allows, based on a position measurement, to set a position offset to the motor in order to ensure it is physically at the home position against a physical object, mechanically blocking the movement require adequate torque limits for not damaging mechanics during homing process. The StepBlock condition is that we have reached the torque limit and real velocity falls below 5% of demanded.
The Homing procedure allows, based on a position measurement, to set a position offset to the motor in order to ensure it is physically at the home position against a physical object, mechanically blocking the movement require adequate torque limits for not damaging mechanics during homing process. The StepBlock condition is that we have reached the torque limit and real velocity falls below 5% of demanded.
- Home is commanded by user in the desired homing direction at the selected Velocity
- Torque
 Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist is limited.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist is limited. - Time and Distance Limits can cause error if exceeded
- Process is finished when Torque is in limit condition and real velocity is below 5% of selected velocity.
- This Function Block A function block groups an algorithm and a set of private data. It has inputs and outputs. doesn’t modify actual position

Related Functions
Example
Structured Text
|
PositiveDirection :=0; Velocity :=10000.0; TorqueLimit :=50.0; TimeLimit :=T#10s; DistanceLimit :=10000.0;
Inst_MCFB_StepBlock( True, Axis1, PositiveDirection, Velocity, 1000, 1000, 0, TorqueLimit, TimeLimit, DistanceLimit, 0 );
HomeComplete :=Inst_MCFB_StepBlock.Done; HomeBusy :=Inst_MCFB_StepBlock.Busy; HomeActive :=Inst_MCFB_StepBlock.Active; HomeAborted :=Inst_MCFB_StepBlock.CommandAborted; HomeError :=Inst_MCFB_StepBlock.Error; HomeErrorID :=Inst_MCFB_StepBlock.ErrorID;
|
Ladder Diagram
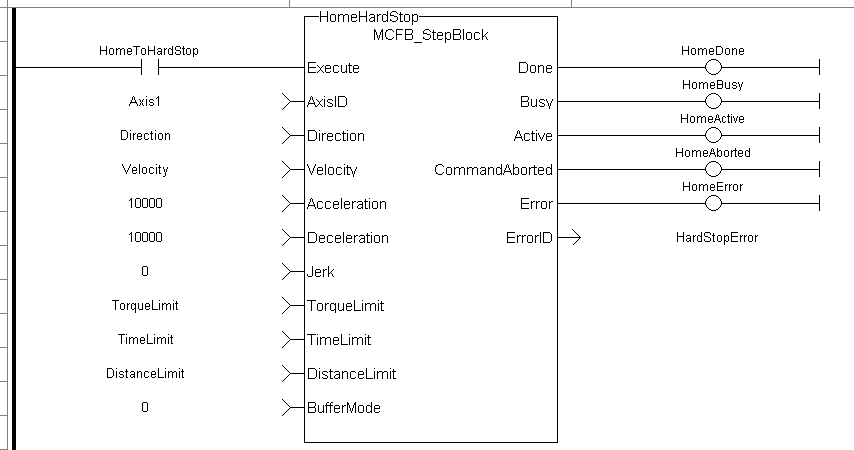
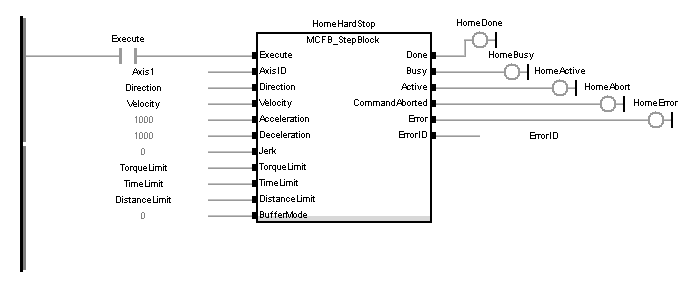
Function Block Diagram
 [Top]
[Top]





