Architectural View
The diagram shows an architectural view of what KAS is from a hardware and software perspective, or realtime and not-realtime components. Hardware is shown in blue shaded boxes and, minimally consists of a computer, a controller, one or more drives, I/O, and optionally an HMI![]() "Human-machine interfaces "
Also known as computer-human interfaces (CHI), and formerly known as man-machine interfaces, they are usually employed to communicate with PLCs and other computers, such as entering and monitoring temperatures or pressures for further automated control or emergency response device. Each of these components has a software aspect, many of which communicate with other components. Communication may be done over Ethernet
"Human-machine interfaces "
Also known as computer-human interfaces (CHI), and formerly known as man-machine interfaces, they are usually employed to communicate with PLCs and other computers, such as entering and monitoring temperatures or pressures for further automated control or emergency response device. Each of these components has a software aspect, many of which communicate with other components. Communication may be done over Ethernet![]() Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) or HTTP (seen in blue), EtherCAT
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) or HTTP (seen in blue), EtherCAT![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs (seen in green), Modbus
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs (seen in green), Modbus![]() ModBus is a serial communications protocol and is now the most commonly available means of connecting industrial electronic devices.
ModBus is often used to connect a supervisory computer with a remote terminal unit in supervisory control and data acquisition (SCADA) systems.
Versions of the ModBus protocol exist for serial port and Ethernet (it is widely used with TCP/IP over Ethernet) (seen in red), or several other protocols.
ModBus is a serial communications protocol and is now the most commonly available means of connecting industrial electronic devices.
ModBus is often used to connect a supervisory computer with a remote terminal unit in supervisory control and data acquisition (SCADA) systems.
Versions of the ModBus protocol exist for serial port and Ethernet (it is widely used with TCP/IP over Ethernet) (seen in red), or several other protocols.
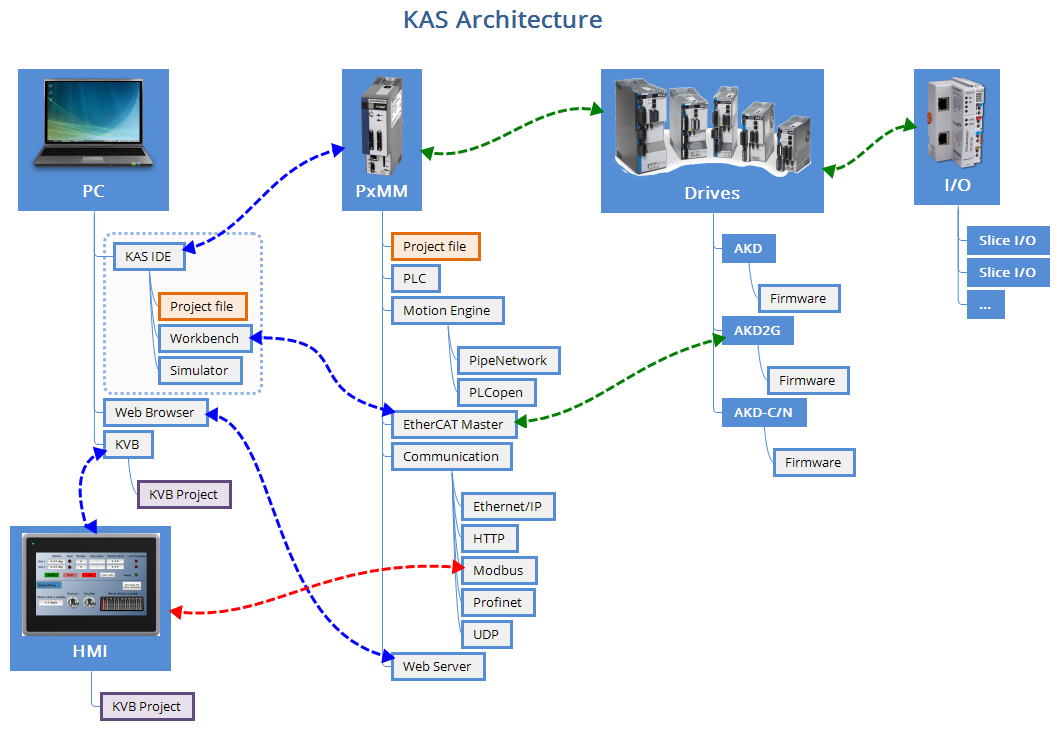
Figure 2-8: Architectural view of KAS components.
The non real-time part is composed of:
| Item | Description |
|---|---|
| KAS IDE |
The development tool which allows creating the project (i.e. design, create and run virtually) |
| KAS Runtime |
... |
| KVB | The development tool which allows creating an HMI interface. |
|
|
Available when integrated on a Programmable Automation Controller platform (not present when integrated a programmable drive) |
The realtime components, including that which run the KAS Runtime engine, consists of:
| Item | Description |
|---|---|
|
|
Responsible for managing an IEC 61131-3 application with its programs and variables |
|
|
Manages motion engines, axis objects and motion bus drivers. The KAS Runtime comes with two motion engines: Pipe Network and PLCopen. The motion engine implements different motion algorithms and functions to create, access and delete pipes, pipe blocks and axes (e.g. MLPNAxisCreate, MLGearInit, MLPipeAct). It also provides a set of Functions and Function Blocks that IEC 61131-3 applications can use to control the behavior of these algorithms |
|
|
Manages I/Os and I/O drivers. It works closely with the VM Manager instances to map transparently all IEC 61131-3 variables declared as input or output |
|
|
A plug-in giving access to the EtherCAT network |
| custom function blocks | A plug-in implementing custom function blocks |
Interface between the realtime and non-realtime systems is done via shared memory buffers.
The Runtime communicates with the KAS IDE during operation to:
- Receive further instructions from the KAS IDE such as a direct motion command
- Provide status information to the KAS IDE for motion and operation of the application program
- Provide information displayed on the KAS IDE scope
- Provide Log information to the KAS IDE
-
-
When the KAS Runtime is implemented with a programmable drive, the interface between the real-time and non real-time parts is done via Ethernet based on TCP/IP protocol.






