FSoE / PDO Connections Tab
The ![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network, listing their Input (Tx) and Output (Rx) PDOs. This provides you with a way to connect an Input PDO
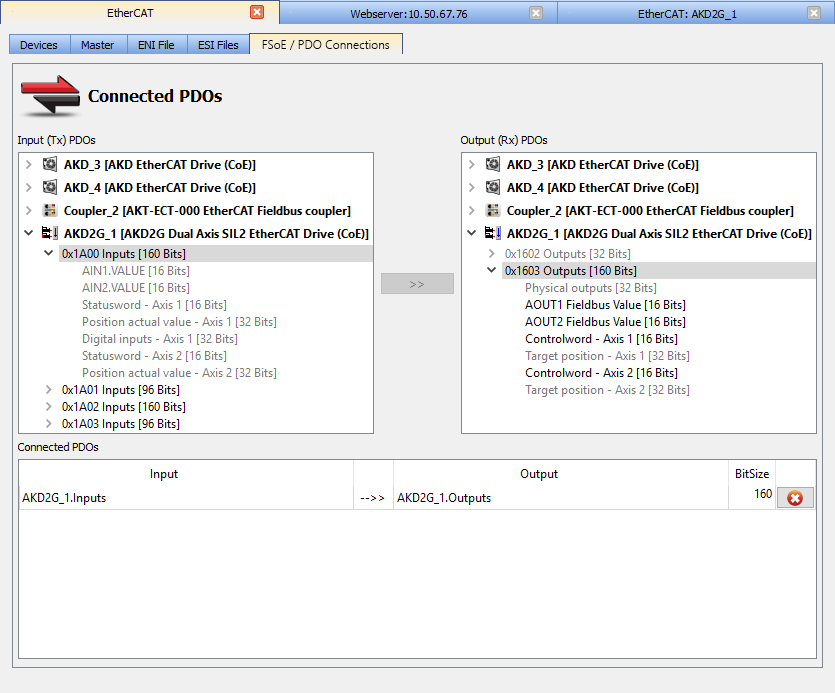
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs network, listing their Input (Tx) and Output (Rx) PDOs. This provides you with a way to connect an Input PDO![]() PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. to an Output PDO.
PDO is a type of protocol frame used in some fieldbuses. A PDO contains one or more object dictionary entries, which define the application data transferred between devices. to an Output PDO.
The KAS Runtime![]() In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running will copy the PDO data between the connected PDOs when EtherCAT is in operational mode. This feature makes it possible to transfer safety-critical process data via the EtherCAT frames. The FSoE protocol, communication, and state machine are handled by the EtherCAT Safety devices.
In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running will copy the PDO data between the connected PDOs when EtherCAT is in operational mode. This feature makes it possible to transfer safety-critical process data via the EtherCAT frames. The FSoE protocol, communication, and state machine are handled by the EtherCAT Safety devices.
-
- Connected PDOs are intended for FSoE operation. This feature is not limited to FSoE, it could be useful for any application that need to copy PDO data between EtherCAT devices.
These instructions assume you have already scanned the EtherCAT network.
- Double-click (or right-click) on EtherCAT in the Project Explorer, and select the FSoE tab.
-
Select the desired Input PDO.
Output PDOs which may be mapped (or paired) to the input are shown in black. Outputs of a different size are grayed out.
- Select the desired Output PDO.
- Click on the Connect PDOs button.
Connected PDOs are listed at the bottom of the tab.
-
- An example of mapping PDOs may be found in the topic Set Up FSoE Master and an AKD2G with SafeMotion Monitor.
- Double-click (or right-click) on EtherCAT in the Project Explorer, and select the FSoE tab.
- Select the desired pair of Connected PDOs from the list at the bottom of the tab.
- Click the Delete Connection button.
The PDO's connection is removed internally when the device is removed using the ECATDeviceAction function block and has its PDO connected to another device. The PDOs will automatically be reconnected when the device is connected back to the EtherCAT network.
-
- Inputs and Outputs must have identical Bit sizes in order to be paired.
See Also: Safety over EtherCAT






