Ethernet/IP IO Scanner (Client)
The KAS Runtime![]() In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running includes a fully integrated Ethernet
In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running includes a fully integrated Ethernet![]() Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs)/IP client driver for exchanging CIP
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs)/IP client driver for exchanging CIP![]() "Common Industrial Protocol "
The Common Industrial Protocol allows complete integration of control with information, multiple CIP Networks, and Internet technologies I/O assemblies as an Ethernet/IP scanner in your applications.
"Common Industrial Protocol "
The Common Industrial Protocol allows complete integration of control with information, multiple CIP Networks, and Internet technologies I/O assemblies as an Ethernet/IP scanner in your applications.
Data Exchange - Configuration
A dedicated configuration tool is integrated in the KAS IDE![]() "Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger.
"Integrated development environment"
An integrated development environment is a type of computer software that assists computer programmers in developing software.
IDEs normally consist of a source code editor, a compiler and/or interpreter, build-automation tools, and a debugger.
- Double-click the Fieldbus
 A Fieldbus is an industrial network system for real-time distributed control (e.g. CAN or Profibus). It is a way of connecting instruments in a plant design node in the project explorer to open it
A Fieldbus is an industrial network system for real-time distributed control (e.g. CAN or Profibus). It is a way of connecting instruments in a plant design node in the project explorer to open it - Click the Insert Configuration icon
 to add the Fieldbus configuration
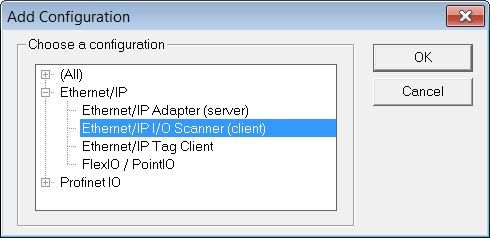
to add the Fieldbus configuration - Then select the Ethernet/IP IO Scanner in the configuration selector
The configuration is represented as a tree:
- Ethernet/IP IO Scanner
- Server (an Ethernet/IP adapter device) (*)
- IO Assembly (Originator to Target)
- Exchanged Variable (*)
- Exchanged Variable (*)
- IO Assembly (Target to Originator)
- Exchanged Variable (*)
- IO Assembly (Originator to Target)
- Server (an Ethernet/IP adapter device) (*)
(*) The items with this mark can appear several times in the configuration.
In addition to the IO configuration, explicit messaging can be performed using the blocks eipReadAttr and eipWriteAttr.
Configuration of the Server
Click the Insert Master icon  to declare a server (slave adapter). Each server is identified by its IP address and an optional Description text.
to declare a server (slave adapter). Each server is identified by its IP address and an optional Description text.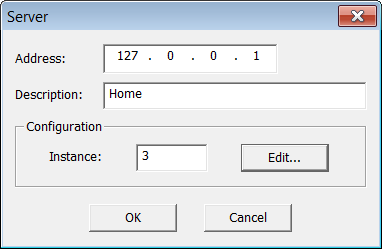
Three blocks of data are exchanged with the server for each connection:
- Outputs (originator to target)
- Inputs (target to originator)
- Configuration: a static block sent to the server at connection time.
The instance number for the configuration may be specified in the properties of the server.
Editing the Configuration Data Block
While most devices do not expect any configuration it may happen that some data is required. For this, double click on the server in the tree and press the Edit... button in the dialog box.
The configuration is entered as a list of items. Use the Type button to specify the number of items and their data types. Structured data types defined in the KAS IDE are supported. Simply enter values in the grid. In case you exchange multiple byte integers (e.g. WORD) you must specify whether the device expects little or big endian formatting.
Configuring an Assembly
Click the Insert Slave icon  to declare a CIP I/O assembly. Each assembly is identified by:
to declare a CIP I/O assembly. Each assembly is identified by:
| Identifier | Meaning |
|---|---|
| Type | Direction of the I/O assembly. Can be one of:
|
| Instance | Instance of the CIP assembly |
| Config.instance | The instance number of the configuration assembly. The default value is 100. 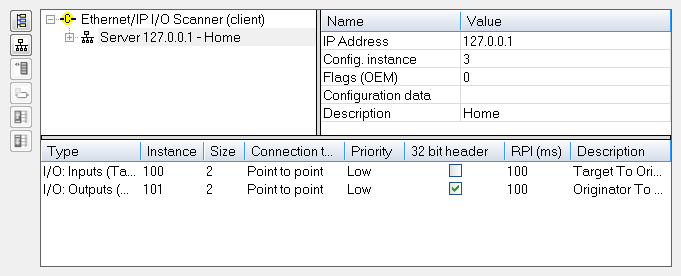 |
| Size | Data size in bytes |
| Connection type | Type of the CIP connection. Can be Point To Point or MultiCast |
| Priority | CIP priority: Low, High, Scheduled or Urgent |
| 32 bit header | Check this option if a 32 bit header is to be sent on notifications |
| RPI(ms) | Minimum period for notification of changes, in milliseconds (range is 10 - 10000 ms) |
| Description | Optional description text |
Configuring Variables
IEC61131-3![]() IEC 61131-3 is the third part of the open international standard IEC 61131. The current (second) edition was published in 2003.
IEC 61131-3 currently defines five programming languages for programmable control systems
It deals with programming languages and defines two graphical and two textual PLC programming language standards variables may be mapped on the data of the assembly. For each variable you must specify:
IEC 61131-3 is the third part of the open international standard IEC 61131. The current (second) edition was published in 2003.
IEC 61131-3 currently defines five programming languages for programmable control systems
It deals with programming languages and defines two graphical and two textual PLC programming language standards variables may be mapped on the data of the assembly. For each variable you must specify:
| Identifier | Meaning |
|---|---|
| Symbol | The name of the IEC61131 |
| Offset | Offset in bytes in the assembly data |
| Bit | Bit offset in the selected byte if format is "Bit" |
| Format | Format of the data in the assembly |
| Mode | Kind of data exchanged through the variable:
|
-
-
The data limit is: 500 bytes of data maximum O(originator)->T(target) and 500 bytes of data maximum T(target) -> O(originator). This is based on the Ethernet/IP specification.






