 Feedback Settings
Feedback Settings
Overview
The AKD2G offers a variety of feedback solutions which allow you to optimize your system based on your specific machine needs. The table below lists the currently supported feedback types with associated connector/feedback ID. Your motor model number will indicate the type of feedback that you have.
Kollmorgen motors with digital feedback devices (such as SFD, EnDat, BiSS![]() "Bi-directional Serial Synchronous interface"
An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder, HIPERFACE and, Tamagawa) are plug and play. With these motors, all feedback and motor settings are configured automatically. Third party motors, or Kollmorgen motors with non-digital feedback types, require parameters to be entered manually. See Non-Plug and Play Feedback Devices.
"Bi-directional Serial Synchronous interface"
An open-source communication protocol for feedback devices. With BiSS, all of the computation for interpolation in regard to position occurs on the ASIC directly in the encoder, HIPERFACE and, Tamagawa) are plug and play. With these motors, all feedback and motor settings are configured automatically. Third party motors, or Kollmorgen motors with non-digital feedback types, require parameters to be entered manually. See Non-Plug and Play Feedback Devices.
Feedback Devices
There are two views which allow you to configure your position feedback devices and provide information about them. The Feedback Devices view provides up-to-date data about the devices. Clicking on the feedback number field opens a Feedback View to configure it.
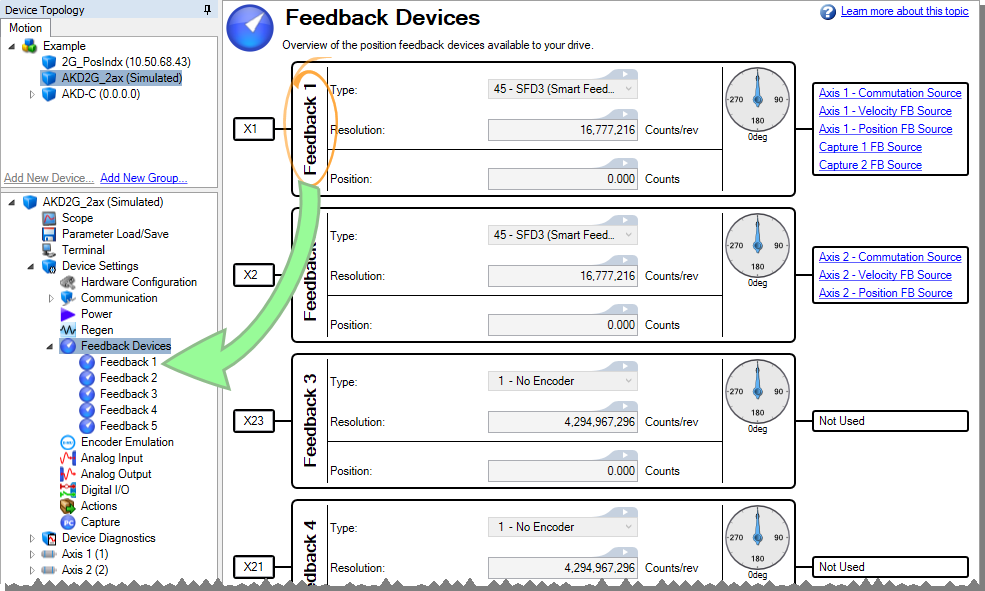
| Element | Description | Parameter | |
|---|---|---|---|
| X# | Indicates the connector used for the feedback | ||
| Feedback # block | [number] | Identifies the feedback and serves as a link to the configuration view | |
| Type | Indicates the feedback type identified | FB#.IDENTIFIED | |
| Resolution | Resolution of the identified feedback | FB#.RES | |
| Position | Current position in raw feedback counts | FB#.P | |
| Graphical Indicator | Visually indicates the position of the feedback within one revolution | ||
| FB Usage | Indicates how the feedback is being used by an axis. Clicking an entry will open the view configuration. | ||
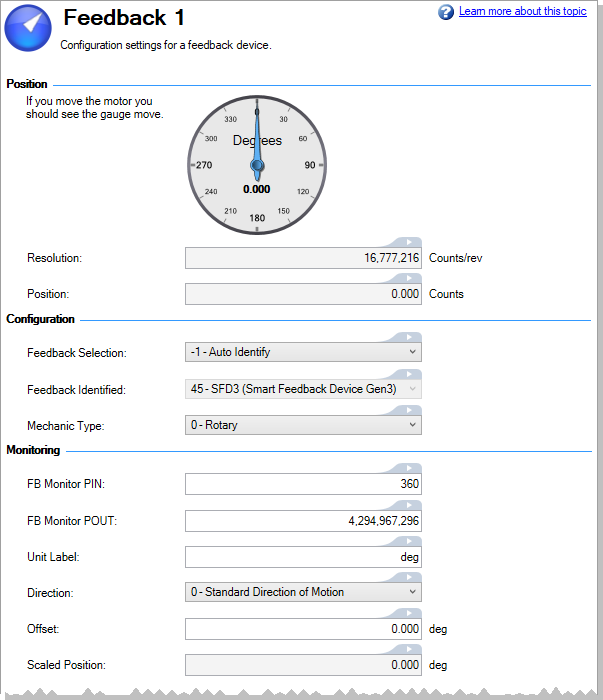
Feedback View
Each feedback device![]() A process whereby some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position has its own view for detailled configuration. This view is used to set up your system to match the proper feedback device. By default, the drive assigns Feedback 1 to Axis 1, Feedback 2 to Axis 2, and uses the Auto Identify setting to detect feedback devices. This setting allows the drive to test the feedback device to see if it is a recognized plug and play device. If the drive recognizes the device, then all parameters for that device and motor are loaded into the drive. Both the feedback and the motor information are now present in the drive and the system is operable.
A process whereby some proportion of the output signal of a system is passed (fed back) to the input.
In automation, a device coupled to each motor to provide indication of the motor's shaft angle, for use in commutating the motor and controlling its speed and position has its own view for detailled configuration. This view is used to set up your system to match the proper feedback device. By default, the drive assigns Feedback 1 to Axis 1, Feedback 2 to Axis 2, and uses the Auto Identify setting to detect feedback devices. This setting allows the drive to test the feedback device to see if it is a recognized plug and play device. If the drive recognizes the device, then all parameters for that device and motor are loaded into the drive. Both the feedback and the motor information are now present in the drive and the system is operable.
Scaling For Use Within WorkBench
| Feedback linked to an axis | Feedback not linked to an axis |
|---|---|
|
The units and scaling of feedback linked to an axis are not configurable because the axis defines the units and gearing values which are set up in the Units view (see Selecting Units for Your Application). The default settings provide scaling in degrees. One revolution of rotary feedback in the positive direction advances the position by 360 degrees. |
Scaling of feedback that is not linked to an axis uses the settings found in the Feedback Settings section of this view. This is typically used to send the feedback position to an external controller via a fieldbus. |
Position
This section of the Feedback view provides the current state of the feedback device.
| Element | Description | Parameter |
|---|---|---|
| Meter |
Provides live data showing the relative position within a revolution of the feedback device. The Mechanic Type setting determines whether the meter type.
|
|
| Resolution | Displays the resolution used for the device. Rotary devices are counts / mechanical revolution, linear devices are counts / pole. | FB#.RES |
| Position | Displays the raw position of the feedback device in counts. | FB#.P |
Configuration
This section of the Feedback view provides for defining the feedback device.
| Element | Description | Parameter |
|---|---|---|
| Feedback Selection | Specify the type of feedback automatically or manually. See Feedback Types below for a description of each type. | FB#.SELECT |
| Feedback Identified | This parameter is set according to FB#.SELECT on drive power up if FB#.SELECT is not –1. Otherwise the parameter value is read from the drive memory. | FB#.IDENTIFIED |
| Mechanic Type | Select whether the feedback is a rotary (0) or linear (1) encoder. | FB#.MECHTYPE |
| Encoder Resolution | Configure the number of lines per revolution for rotary encoders or the line pitch (nm/line) for linear encoders. | FB#.ENCLINES (for rotary) or FB#.LINEPITCH (for linear) |
| Multi-turn Sensor |
Number of multi-turn bits used for BiSS encoders when used in rotary motors. | FB#.MULTITURNBITS |
| Single-turn Sensor Bits | Number of single turn bits used for BiSS rotary encoders. | FB#.SINGLETURNBITS |
| Feedback Poles | Sets the number of individual poles in a Resolver feedback device. This variable is used for the commutation function, as well as for velocity feedback scaling, and represents the number of individual poles (not pole pairs). | FB#.POLES |
| Transformation Ratio | Sets the Resolver nominal transformation ratio. It affects the resolver excitation output amplitude. | FB#.RESKTR |
| Phase Lag | Sets the electrical degrees of phase lag in the Resolver. | FB#.RESREFPHASE |
If the feedback is a non-plug and play device, then you can choose from the list of supported devices in the Feedback Selection list and enter the feedback settings manually. The following sections describe each supported device available in the Feedback Selection list and the input information required to configure each device.
FB#.INFO can be used to read additional information about the feedback when it is available.
Feedback Types
| Value | Type | Description | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| -1 | Auto Identify | This is the default setting for Feedback 1 and 2 and is used to determine if a plug and play device is available. If a plug and play device is available, the FB#.IDENTIFIED keyword indicates the feedback device is detected. FB#.RES is updated with the resolution of the detected feedback. | ||||||||||||
| 1 | No Encoder | This setting can be used if no feedback device is connected to the associated feedback connector. | ||||||||||||
| 10 | Incremental Encoder with Halls |
Incremental encoders are available in a variety of line counts. If you select an incremental encoder option, the encoder resolution must be entered into the Encoder Resolution box or by setting FB#.ENCLINES. The units for this field are in lines per revolution. Wake and Shake will be enabled when using incremental encoders without Halls sensors.
|
||||||||||||
| 11 | Incremental Encoder without Halls | |||||||||||||
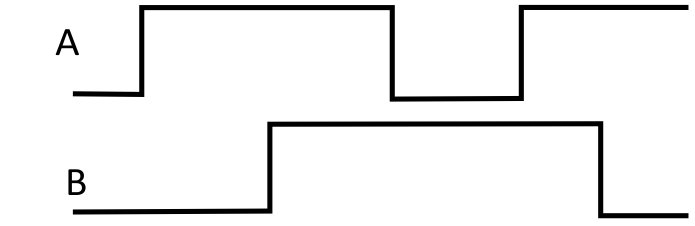
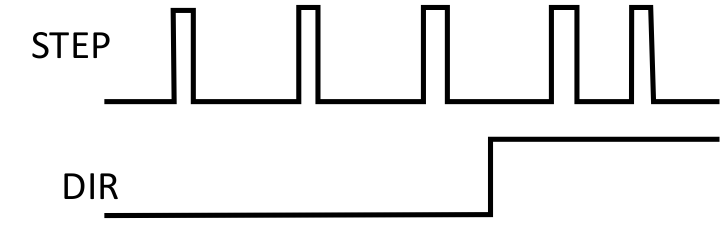
| 13 | Step / Direction |
This mode is intended to be used by controllers to provide a Electronic Gearing source signal. The A line pulses for each step and the B line indicates the direction. Encoder Resolution (FB#.ENCLINES) is used to configure how many pulses per revolution there are.
|
||||||||||||
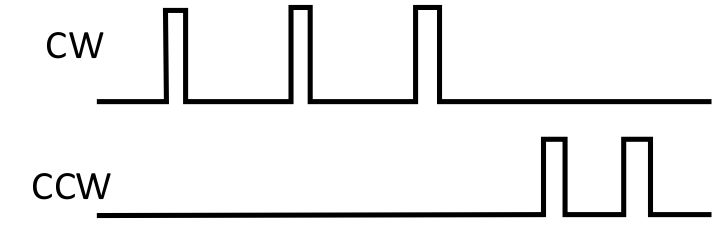
| 14 | CW / CCW |
As with Step/Direction, this mode is intended to be used as a Electronic Gearing source signal. The A line controls pulses in the clock wise direction and the B line control pulses in the counter-clockwise direction. Encoder Resolution (FB#.ENCLINES) is used to configure how many pulses per revolution there are.
|
||||||||||||
| 20 | Sine Encoder with Halls | A sine-cosine uses a sine wave to indicate rotation. As with the incremental encoder, the line count is entered in the Encoder Resolution box or by setting FB#.ENCLINES. The actual resolution is much higher than the encoder line setting from measuring the analog signal. Wake and Shake will be enabled when using sine encoders without Halls sensors. | ||||||||||||
| 21 | Sine Encoder without Halls | |||||||||||||
| 30 | EnDat 2.1 - Analog |
EnDat uses a sine encoder to indicate position with an analog signal. |
||||||||||||
| 31 | EnDat 2.2 - Digital |
EnDat supports both digital only and sin/cos analog signals and may only support digital only depending on encoder model. |
||||||||||||
| 34 | BiSS Mode C - Digital |
These feedback devices are all digital. See manufacturer specs for more information. |
||||||||||||
| 36 | SSI |
Select the type of SSI (Synchronous Serial Interface) device. The SSI Type field defines the manufacturer model and protocol used. The protocols differ in the data format of the serial position bits, and may contain special configuration and flag bits.
See also FB#.SSITYPE. |
||||||||||||
| 40 | Resolver |
The resolver feedback is an analog signal. When selecting the resolver option, the resolver specific parameters phase lag, transformation ratio, and feedback poles are set for motors.
|
||||||||||||
| 41 | SFD (Smart Feedback Device |
Smart Feedback Device (SFD) is Kollmorgen's most popular plug and play device. SFD allows for quick and easy setup from the Auto mode, which automatically configures the drive with the motor and feedback parameters. SFD3 only requires 2 wires while SFD requires 4 wires. | ||||||||||||
| 45 | SFD3 (Smart Feedback Device Gen3) | |||||||||||||
| 46 | HIPERFACE DSL |
These feedback devices are all digital. See manufacturer specifications for more information. |
Control Loop Feedbacks
The default source for Axis 1 is Feedback 1, and for Axis 2 is Feedback 2. This means only SFD3 and HIPERFACE DSL are supported by default. To use other feedbacks, AXIS#.IL.FBSOURCE must be changed to 3 for Feedback 3 and Feedback 3 must be setup for the desired feedback or SFA.
Each axis has a set of control loop feedback sources:
- AXIS#.IL.FBSOURCE is the current loop feedback source, sometimes referred to as the commutation feedback source.
- AXIS#.VL.FBSOURCE is the velocity loop feedback source.
- AXIS#.PL.FBSOURCE is the position loop feedback source.
AXIS#.OPMODE determines which control loops are active, and therefore which feedback sources are used.
The default control loop feedback sources corresponds to the axis. For Axis 1, the feedback sources default to Feedback 1. For Axis 2, the feedback sources default to Feedback 2.
Two-wire feedbacks (SFD3 and HIPERFACE DSL) and feedbacks connected via SFA can be used with the default feedback sources. When other feedback connections, such as Feedback 3, are used as control loop sources, the FBSOURCE parameters must be set accordingly.
Scaled Feedback
For feedback not associated with an axis, a set of scaled feedback parameters are provided to optionally represent the feedback position in scaled units.
- FB Monitor PIN (FB#.SCALED.PIN) and FB Monitor POUT (FB#.SCALED.POUT) specify the scaling ratio.
- Direction (FB#.SCALED.DIR) sets the direction of the scaled position.
- Offset (FB#.SCALED.OFFSET) sets an offset adjustment.
- Unit Label (FB#.SCALED.LABEL) is a short units text description.
The Scaled Position is calculated as follows:

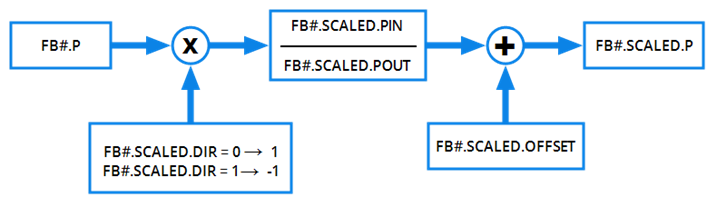
| FB#.SCALED.DIR | Direction Sign |
|---|---|
| 0 | 1 |
| 1 | -1 |
Dual-Loop
There are separate feedback sources for the current, velocity, and position loops. By default they’re all set to the current loop feedback source (AXIS#.IL.FBSOURCE). If a separate feedback is desired for the different loops, those sources can be set independently using AXIS#.VL.FBSOURCE and AXIS#.PL.FBSOURCE .
Electronic Gearing
For Electronic Gearing, AXIS#.GEAR.FBSOURCE is also available. See the Electronic Gearing feature for more information.
Feedback to Connector Mapping
Feedback Connector Mapping
| AKD2G Feedback Connector | AKD2G Feedbacks |
|---|---|
| X1 | FB1 |
| X2 | FB2 |
| X23 | FB3 |
| X21 | FB4 |
| X22 | FB5 |
Feedback Types Supported on Each Connector
Feedback Types Supported
|
Feedback Type |
Description |
FB1 (X1) |
FB2 (X2) |
FB3 (X23) |
FB4 (X21) |
FB5 (X22) |
Plug & Play |
SFA-R00 (X41) |
SFA-E00 (X41) |
|---|---|---|---|---|---|---|---|---|---|
|
Incremental Encoder |
With Halls and Index |
|
✔ |
|
|
|
✔ |
||
|
No Halls with Index |
|
✔ |
|
|
✔ |
||||
|
No Halls and No Index |
|
✔ |
✔ |
✔ |
✔ |
||||
|
Step/Direction |
|
|
✔ |
✔ |
✔ |
|
|
||
|
CW/CCW |
|
|
✔ |
✔ |
✔ |
|
|
||
|
Sine Encoder |
With Digital Halls |
|
✔ |
|
|
|
✔ |
||
|
With Digital Halls and Analog Index |
|
✔ |
|
|
✔ |
||||
|
No Halls and No Index |
|
✔ |
|
|
✔ |
||||
|
EnDat Analog |
Single and Multi-Turn |
|
✔ |
|
|
✔ |
✔ |
||
|
EnDat Digital |
All digital |
|
✔ |
|
✔ |
✔ |
✔ |
||
|
Analog/Digital |
|
✔ |
|
✔ |
✔ |
||||
|
BiSS-B Analog |
All Analog |
|
|
✔ |
|
|
|
✔ |
|
|
HIPERFACE |
All Analog |
|
|
✔ |
|
|
|
✔ |
|
|
BiSS-C Digital |
All Digital |
|
✔ |
|
✔ |
✔ |
✔ |
||
|
Resolver |
Std and Multi pole |
|
|
✔ |
|
|
|
✔ |
|
|
SFD |
|
|
|
✔ |
|
|
✔ |
✔ |
|
|
SFD3 |
|
✔ |
✔ |
|
|
|
✔ |
||
|
HIPERFACE DSL |
All Digital |
✔ |
✔ |
|
|
|
✔ |
||
| SSI | Synchronous Serial Interface | ✔ | ✔ | ✔ |
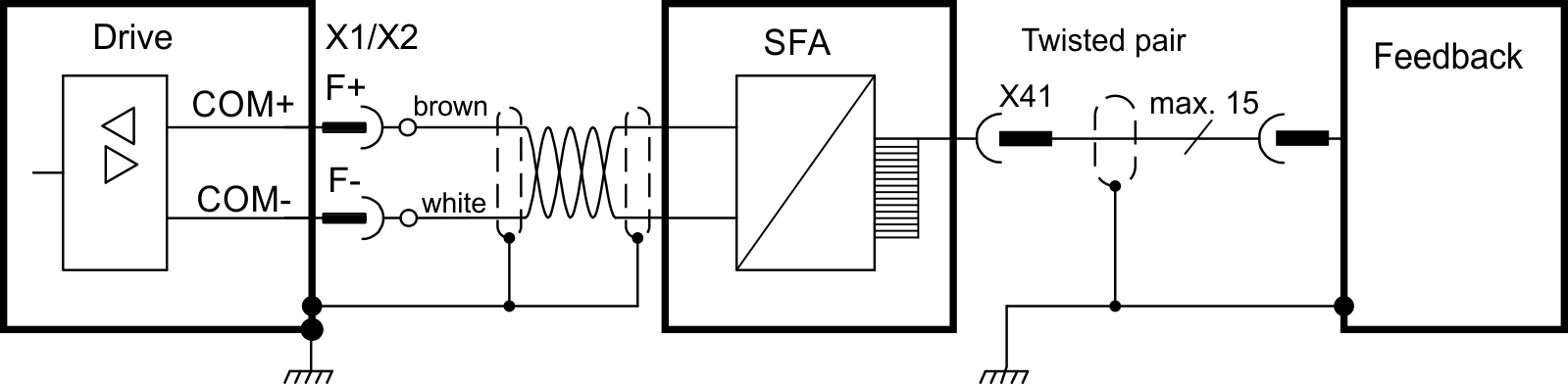
Smart Feedback Adapter
Kollmorgen provides an optional Smart Feedback Adapter (SFA) to allow feedback devices that normally connect to X23 (FB3) to connect through X1 (FB1) and X2 (FB2) instead. For example, on a dual axis drive requiring two resolver feedbacks, X23 could be used for one feedback and an SFA on X2 could be used for the other feedback. See Feedback Connector X41 for details on connecting SFA hardware to AKD2G.
For connections that support SFA (X1 and X2), SFA feedback types can be selected using FB#.SELECT in the same manner as other feedbacks. SFA feedback types appear as options for FB#.SELECT when the corresponding feedback connector supports SFA. For example, FB1.SELECT and FB2.SELECT show the SFA feedback types as options. See FB#.SELECT for a list of supported SFA feedback.
When the feedback is selected (see FB#.SELECT), the SFA is programmed with an FPGA![]() "Field-Programmable Gate Array"
FPGA is a semiconductor device that can be configured by the customer or designer after manufacturing; hence the name "field-programmable" image automatically if needed.
"Field-Programmable Gate Array"
FPGA is a semiconductor device that can be configured by the customer or designer after manufacturing; hence the name "field-programmable" image automatically if needed.
SFA cable flying leads connected to X1 (FB1, EEO3) or X2 (FB2, EEO4):
Commands Used for Each Feedback
| FB#.SELECT | Incremental Encoder with Halls | Incremental Encoder without Halls | Sine Encoder with Halls | Sine Encoder without Halls | EnDat Analog | EnDat Digital | BiSS-B Analog | HIPERFACE | SSI | BiSS-C Digital | Resolver | SFD | SFD3 | HIPERFACE DSL |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 10 | 11 | 20 | 21 | 30 | 31 | 32 | 33 | 36 | 34 | 40 | 41 | 45 | 46 | |
| FB#.MECHTYPE | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| FB#.SINGLETURNBITS | ✔ | ✔ (R) | ✔ (R) | |||||||||||
| FB#.MULTITURNBITS | ✔ | ✔ (R) | ✔ (R) | |||||||||||
| FB#.BITS | ✔ (L) | ✔ (L) | ||||||||||||
| FB#.ENCLINES | ✔ (R) | ✔ (R) | ✔ (R) | ✔ (R) | ||||||||||
| FB#.LINEPITCH | ✔ (L) | ✔ (L) | ✔ (L) | ✔ (L) | ✔ (L) | ✔ (L) | ||||||||
| FB#.RES | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ |
| FB#.HALLSTATE | ✔ | ✔ | ||||||||||||
| MOTOR.MEMVER | ✔ | ✔ | ✔ | ✔ | ✔ | ✔ | ||||||||
| FB#.POLES | ✔ | |||||||||||||
| FB#.RESKTR | ✔ | |||||||||||||
| FB#.RESREFPHASE | ✔ | |||||||||||||
| FB#.SSITYPE | ✔ | |||||||||||||
| FB#.TRACKINGCAL | ✔ | ✔ | ✔ | ✔ | ✔ | |||||||||
| FB#.USERBYTE, FB#.USERWORD, FB#.USERDWORD | ✔ | Future | Future | ✔ | ✔ |
(R) = Rotary
(L) = Linear






