 Service Motion
Service Motion
Service Motion allows you to set up simple motion (Command Source must be set to Mode 0 - Service). It is typically used during initial set up to exercise the system. It can be used to help troubleshoot the system, execute tuning, make repetitive moves for verification of mechanical set up, or for other general simple motion needs. There are multiple ways to set up motion depending on the desired result in torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist, velocity or position modes. In all modes, you can run a momentary pulse, set up reversing motion, or initiate continuous motion.
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist, velocity or position modes. In all modes, you can run a momentary pulse, set up reversing motion, or initiate continuous motion.
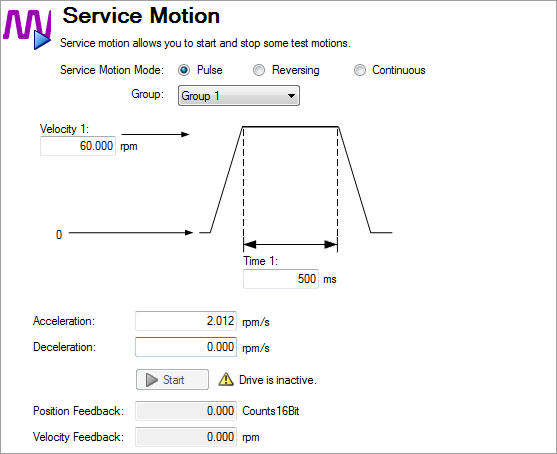
The chart below identifies the commands available on the Sevice Motion view:
| Button or Dialog Box |
Description |
Available in OP Mode |
|---|---|---|
|
Alternates between the commanded current or velocity and zero velocity. You can specify the time period between the commanded value and the return to zero. Setting a time to zero will generate a continuous command. |
Torque |
|
|
Reversing |
Alternates between the two commanded values. You can specify the time the command will be held in each state. |
Torque, Position, Velocity |
|
Continuous |
Runs the commanded current or velocity continuously. |
Torque, Position, Velocity |
| Group | Selects parameter group to be used with service motion. Group 1 selects parameter group for AXIS#.SM.MODE 0, and group 2 selects parameter group for AXIS#.SM.MODE 2. | Torque, Position, Velocity |
| Current 1/Current 2 | Only shows while drive is in Torque mode. Sets the two different currents. | Torque |
|
Velocity 1/Velocity 2 |
Only shows while drive is in Velocity or Position mode. Sets the two different velocities. |
Velocity, Position |
|
Time 1/Time 2 |
Sets the time for which the different commands are generated. Setting a time to zero generates a continuous command. |
Velocity, Position |
|
Start/Stop |
Starts and stops the motion. |
Torque, Position, Velocity |
| Acceleration | Sets the acceleration ramp for service motion. This value may not be 0. | Velocity, Position |
| Deceleration | Sets the deceleration ramp for service motion. | Velocity, Position |
|
Position Feedback |
Displays the present position of the motor. |
Torque, Position, Velocity |
|
Velocity Feedback |
Displays the present velocity of the motor. |
Torque, Position, Velocity |
| Current Feedback | Displays the present current of the motor. Only displays when drive is in Torque mode. | Torque |






