AKT2G-BRC-000 Basic Function Principles
-
- The brake chopper terminal transfers several items of information about the operating status via the process data.
Jump to a section on this page:
Chopper Operation
The brake chopper terminal has an internal capacitance that takes up the dissipated energy from brake applications up to the complete charging of the capacitors. In order to be able to protect connected devices after charging as well, an external resistor is switched on after the set threshold value is exceeded (default 50 V) in order to be able to convert the surplus energy into thermal energy.
Temperature Model for the External Resistor
The surplus energy is converted into thermal energy via the external resistor. In the event of an error or in case of large motors, there is a possibility of the resistor overheating, which can damage the resistor itself as well as adjacent components. For this reason a temperature model has been integrated in the Bus Terminal that simulates the temperature of the resistor and, if a set temperature is exceeded, switches the resistor off until the temperature falls below the threshold value for the warning bit.
The switch-off can be deactivated via the CoE Init-Command (“Disable Chopper on Overtemperature”). In this case chopping also continues in the case of overheating.
The temperature model is adjusted via the CoE data for the resistor employed:
- The “Ambient temperature offset” parameter should be set to the ambient temperature of the external resistor. The temperature model calculates the difference to the ambient temperature due to the power dissipation. In order to be able to estimate the actual temperature, the ambient temperature is set by this parameter.
- The thermal resistance of the ballast resistor to the environment is set by the “Absolute thermal resistance” parameter. This value is required for the calculation of the temperature. When the ZB8110 is used, the value is 1300 m°C/W.
- Analogous to the previous parameter the thermal time constant of the resistor is set by the “Thermal time constant”. The thermal resistance and the thermal time constant can be taken from the data sheet for many resistors. If this is not the case, the data can also be determined manually by the user by means of a diagram or a measurement. (See the Section Measuring the resistance for this). When the ZB8110 is used, the value is 550 s.
- The “I2T warn level” parameter specifies the threshold value for the warning bit in the process data and the LED on the front panel of the Bus Terminal. In the case that the “Disable chopper on overtemperature” bit is set (default), the lower end of the switch-off hysteresis loop of the temperature model is defined by this parameter. The upper end is the “I2T error level” parameter.
- The switch-off threshold for the temperature model is defined by the “I2T-Model” setting value. If the “Disable chopper on overtemperature” bit is activated and this temperature is exceeded, the resistor is not switched on again until the calculated temperature in the temperature model has fallen below the “I2T warn level” threshold. If the temperature is allowed to rise still further due to the settings in the CoE data, the overtemperature is signaled via the “Error” LED on the front panel and the corresponding bit is output in the process data.
Software Filter
The AKT2G-BRC-000 is equipped with a digital software filter which, depending on its settings, can adopt the characteristics of a Finite Impulse Response filter (FIR filter), or an Infinite Impulse Response filter (IIR filter). The filter is activated by default as 50Hz-FIR. If a filter is activated, it is active for the supply voltage and at the same time for the current through the external resistor.
In the respective measuring mode the filter can be activated (0x8000:02) and parameterized (0x8000:1A).
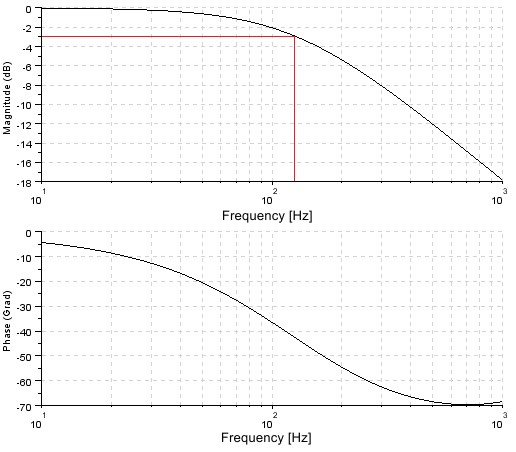
- FIR 50/60 Hz
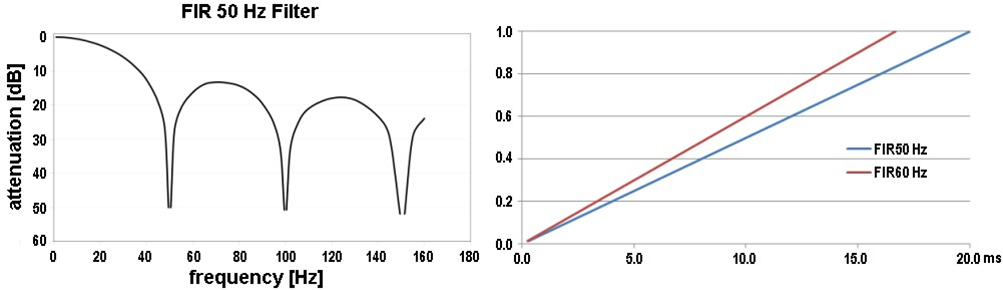
The filter operates as a notch filter. A 50 Hz and a 60 Hz filter are available.
Notch filter means that the filter has zeros (notches) in the frequency response at the filter frequency and multiples thereof, i.e. it attenuates the amplitude at these frequencies. The FIR filter operates as a non-recursive filter.
Figure 8-15: Notch characteristic/amplitude curve and step response of the FIR filter
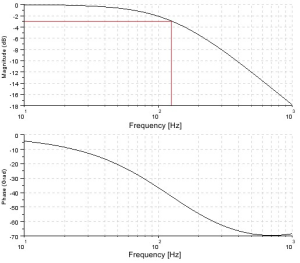
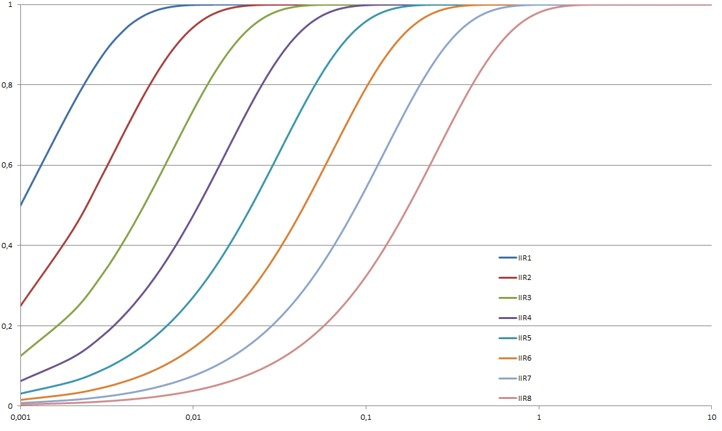
- IIR-Filter 1 to 8
The filter with IIR characteristics is a discrete time, linear, time invariant filter that can be set to eight levels (level 1 = weak recursive filter, up to level 8 = strong recursive filter).
The IIR can be understood to be a moving average value calculation after a low-pass filter.
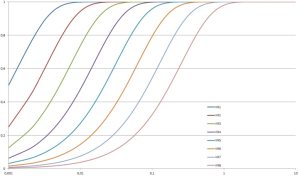
Figure 8-16: AKT2G-BRC-000 Step response of the IIR filter
Overview of Conversion Times
| Filter Settings | Value | PD |
Filter property | Limit frequency (-3 dB) [Hz] (typ.) | Comment | Rise time 10-90 % [s] (typ. |
|---|---|---|---|---|---|---|
| Filter deactivated | - | 1 ms | - | - | ||
| 0 | FIR 50 Hz | 1.25 ms | 50 Hz notch filter | 22 Hz | - | 0.013 |
| 1 | FIR 60 Hz | 1.04 ms | 60 Hz notch filter | 25 Hz | - | 0.016 |
| 2 | IIR 1 | 1 ms | Low-pass | 80 Hz | a0=1/21=0.5 | 0.003 |
| 3 | IIR 2 | Low-pass | 40 Hz | a0=1/22=0.25 | 0.008 | |
| 4 | IIR 3 | Low-pass | 20 Hz | a0=1/23=1.25e-3 | 0.017 | |
| 5 | IIR 4 | Low-pass | 10 Hz | a0=1/24=62.5e-3 | 0.034 | |
| 6 | IIR 5 | Low-pass | 5 Hz | a0=1/25=31.2e-3 | 0.069 | |
| 7 | IIR 6 | Low-pass | 2.5 Hz | a0=1/26=15.6e-6 | 0.14 | |
| 8 | IIR 7 | Low-pass | 1.25 Hz | a0=1/27=781e-6 | 0.28 | |
| 9 | IIR 8 | Low-pass | 0.62 Hz | a0=1/28=390e-6 | 0.562 |
-
-
IIR Filter
Differential equation is as follows.

with:
- a0+b1=1
- a0=(see table)
- b1=1-a0






