Axis Parameters
Boolean Parameters
This table is a list of Boolean parameters currently supported.
These parameters are read and written by the function blocks MC_ReadBoolPar and MC_WriteBoolPar.
| Parameter | ID | Name | R/W | Update Rate Type | Description |
|---|---|---|---|---|---|
| MC_AXIS_PARAM_IN_POSITION | 1011 | Axis In-Position | Read Only | Controller |
|
| MC_AXIS_PARAM_DRIVE_WARNING | 1013 | Drive Warning | Read Only | EtherCAT Cyclic |
Drive Warning Status. 1 |
| MC_AXIS_PARAM_REGIST_GOOD | 1025 | Good Registration Mark Occurred | Read Only | EtherCAT Non-Cyclic |
|
| MC_AXIS_PARAM_REGIST_BAD | 1026 | Bad Registration Mark Occurred | Read Only | EtherCAT Non-Cyclic |
|
| MC_AXIS_PARAM_FI_OCCURRED | 1027 | Fast Input |
Read Only | EtherCAT Non-Cyclic |
Deprecated Behavior
|
| MC_AXIS_PARAM_APPLY_SUPERIMPOSED_DISTANCE | 1033 | Apply Superimposed Distance | Read/Write | Controller |
The default value for this parameter is False.
Param 1033 = False
Param 1033 = True |

Non-Boolean Parameters
This table is a list of non-Boolean parameters currently supported.
These parameters are read and written by the function blocks MC_ReadParam and MC_WriteParam.
| Parameter | ID | Name | R/W | Update Rate Type | Description |
|---|---|---|---|---|---|
| MC_AXIS_PARAM_CMD_POS | 1 | Command Position | Read Only | Controller |
|
| MC_AXIS_PARAM_ACT_VEL | 10 | Actual Velocity | Read Only | EtherCAT Cyclic |
|
| MC_AXIS_PARAM_CMD_VEL | 11 | Command Velocity | Read Only | Controller |
|
| MC_AXIS_PARAM_PHASE_SHIFT | 1000 | Phase Shift | Read Only | Controller |
|
| MC_AXIS_PARAM_SUPERIMPOSED_DISTANCE | 1001 | Superimposed Distance | Read Only | Controller |
|
| MC_AXIS_PARAM_MASTER_OFFSET | 1002 | Master Offset | Read / Write | Controller |
|
| MC_AXIS_PARAM_SLAVE_OFFSET | 1003 | Slave Offset | Read/Write | Controller |
|
| MC_AXIS_PARAM_MOVE_TYPE_ACTIVE | 1004 | Active Move Type | Read Only | Controller |
The active move type. See Move Types. |
| MC_AXIS_PARAM_MOVE_TYPE_NEXT | 1005 | Next Move Type | Read Only | Controller |
The queued (next) move type. See Move Types. |
| MC_AXIS_PARAM_POSITION_ERROR | 1006 | Position Error | Read Only | EtherCAT Cyclic |
Position error in user units. |
| MC_AXIS_PARAM_FEEDBACK_LAST | 1007 | Raw Feedback | Read Only | EtherCAT Cyclic |
|
| MC_AXIS_PARAM_ROLLOVER_POSITION | 1008 | Rollover | Read/Write | Controller |
|
| MC_AXIS_PARAM_VELCOMP_FACTOR | 1009 | Velocity Compensation Factor | Read/Write | Controller |
|
| MC_AXIS_PARAM_VELCOMP_FILTER | 1010 | Velocity Compensation Filter | Read/Write | Controller |
|
| MC_AXIS_PARAM_IN_POSITION_BAND | 1012 | Axis In-Position Bandwidth |
Read/Write | Controller | The bandwidth about the command position to determine the state of the in-position flag. 2 |
| MC_AXIS_PARAM_DRIVE_STATUS | 1014 | Drive Status | Read Only | EtherCAT Cyclic |
|
| MC_AXIS_PARAM_UU_FB_RATIO_NUM | 1015 | User Unit to feedback unit ratio numerator | Read Only | Static |
|
| MC_AXIS_PARAM_TORQUE_ACTUAL | 1016 | Actual Torque |
Read Only | EtherCAT Cyclic |
|
| MC_AXIS_PARAM_BUS_ADDRESS | 1017 | Drive Address | Read Only | Static |
|
| MC_AXIS_PARAM_SENSOR_DELAY | 1018 | Sensor |
Read/Write | Controller | Compensation for Physical sensor |
| MC_AXIS_PARAM_INTERP_CMD_POS | 1019 | Interpolated Command Position | Read Only | Controller |
|
| MC_AXIS_PARAM_INTERP_CMD_VEL | 1020 | Interpolated Command Velocity | Read Only | Controller |
|
| MC_AXIS_PARAM_REGIST_COMP | 1021 | Registration Compensation | Read Only | Controller |
|
| MC_AXIS_PARAM_REGIST_DIST | 1022 | Distance Between the Last Two Good Registration Marks | Read Only | EtherCAT Non-Cyclic |
|
| MC_AXIS_PARAM_REGIST_GOOD_CNT | 1023 | Number of Consecutive Good Registration Marks | Read/Write | EtherCAT Non-Cyclic |
|
| MC_AXIS_PARAM_REGIST_BAD_CNT | 1024 | Number of Consecutive Bad Registration Marks | Read/Write | EtherCAT Non-Cyclic |
|
| MC_AXIS_PARAM_UU_FB_RATIO_DEN | 1028 | User Unit to feedback unit ratio denominator | Read Only | Static |
|
| MC_AXIS_PARAM_CM_ACT_CMD_POS | 1029 | Coordinated Motion Applied Command Position | Read Only | Controller |
Amount of motion actually applied to the PLCopen |
| MC_AXIS_PARAM_CM_CMD_POS | 1030 | Coordinated Motion Command Position | Read Only | Controller |
Amount of motion requested of a PLCopen axis by the Coordinated Motion commands. |
| MC_AXIS_PARAM_INGEAR_BANDWIDTH | 1031 | "In Gear" bandwidth | Read/Write | Controller | |
| MC_AXIS_PARAM_DRIVE_AXIS_NUMBER | 1032 | Drive Axis Number | Read Only |
One-based number that specifies the axis on the drive. |
|
| MC_AXIS_PARAM_UU_FB_RATIO | 1034 | User unit to feedback unit ratio | Read Only | Static |
|
| MC_AXIS_PARAM_UU_REV_RATIO | 1037 | User Unit revolution ratio | Read/Write | Controller |
|
Notes
- This is a configuration parameter.
- There is some delay is acquiring fast input information from drives as well as calculating the registration marks.
While the information is evaluated cyclically, there may be a few cycles between when the fast input occurs and the system records the registration marks.
See Tuning Controller Performance for EtherCAT Communication Latency for more information. - There is some delay is acquiring fast input information from drives as well as calculating the fast input position.
While the information is evaluated cyclically, there may be a few cycles between when the fast input occurs and the system records the fast input data.
See Tuning Controller Performance for EtherCAT Communication Latency for more information. - There is some delay in acquiring the actual position values.
While the information is evaluated cyclically, there may be a few cycles between when the actual position is updated in the drive and the system records the fast input data.
See Tuning Controller Performance for EtherCAT Communication Latency for more information.
| Update Rate Type | Description |
|---|---|
|
Update rate depends on the EtherCAT. (link to ECAT update page EtherCAT Master Settings Tab) and KAS application program (link to Define the PLC Cycle) update rates |
|
|
Update rate depends on the update rate of reading the parameter through EtherCAT (Link to times to read non-cyclic parameters [? does the time come from ECATReadSDO FB or from the MCReadParam DriveReadParam FB EtherCAT Library]) and KAS application program update rate. |
|
|
Update rate depends on KAS application program update rate. (link to Define the PLC Cycle) |
|
|
Values do not change after axis is created. |
User Units to Feedback Units Ratio
Parameters 1015 and 1028 are set during the MC_CreatePLCAxis function block execution.
- These two parameters work together to form the User Units to Feedback Units Ratio (UU/FBU Ratio).
- The drive interface units are fixed by the drive and define the drive units per revolution.
- This is used to command the drive per the ratio.
Example 1
For a drive where the drive interface units are set to 1048576 units per revolution, the value of the UU-per-revolution ratio is calculated as:
UU per revolution = MC_AXIS_PARAM_UU_FB_RATIO_NUM * 1048576 / MC_AXIS_PARAM_UU_FB_RATIO_DEN
Example 2
For a drive:
- A ratio of 360 UU / 1048576 FBU generates 360 UU per revolution of the drive motor and a 0.000343323 UU-to-FBU ratio.
- A ratio of 11379 UU / 1898996404 FBU generates 6.283185 UU per revolution of the drive motor and a 5.99211e-6 UU-to-FBU ratio.
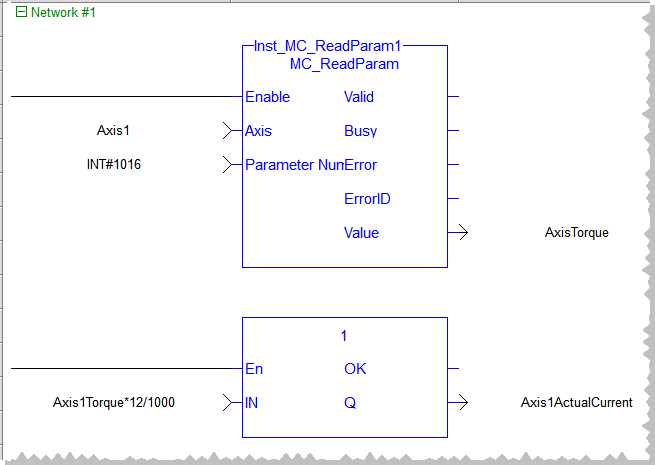
Example 3 - Reading the Current to Units of Amps
After reading the current using MC_ReadParam, this equation converts current to amps for a 12 amp peak drive:
MC_AXIS_PARAM_TORQUE_ACTUAL * Drive Continuous Current Rating / 1000