![]()
 Function Block
Function Block![]() A function block groups an algorithm and a set of private data. It has inputs and outputs. - Sets the kinematic transform between the Machine Coordinate System and the Axes Coordinate System.
A function block groups an algorithm and a set of private data. It has inputs and outputs. - Sets the kinematic transform between the Machine Coordinate System and the Axes Coordinate System.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
0, 1 |
N/A |
No default |
On the rising edge |
|
AxesGroup |
No range |
N/A |
No default |
The axes group that receives the axis trajectory values from the kinematic transform. |
|
|
KinTransform |
MC_KIN_REF |
No range |
N/A |
No default |
Kinematic robotic transform defined by the MC_KIN_REF Structure. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
|
|
If TRUE, the command completed successfully. |
|
Error |
BOOL |
|
|
If TRUE, an error has occurred. |
|
ErrorID |
INT |
|
|
Indicates the error if Error output is TRUE. See the table in PLCopen Function Block ErrorIDs. |
Remarks
- See Function Blocks - General Rules for more information about how inputs and outputs work.
-
- After MC_SetKinTra(...) is called, the controller automatically calculates the inverse kinematics for the robot axes, converting the robot path motion into the individual robot joint axis trajectories.
- Several transform types are available for common robotic systems and are configurable with the MC_KIN_REF Structure.
- The parameters in the MC_KIN_REF structure define the specific robot geometry.
- See MC_KIN_REF Structure for a description of the structure.
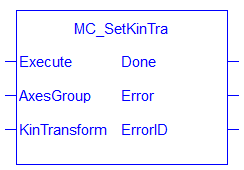
Figure 6-128: MC_SetKinTra
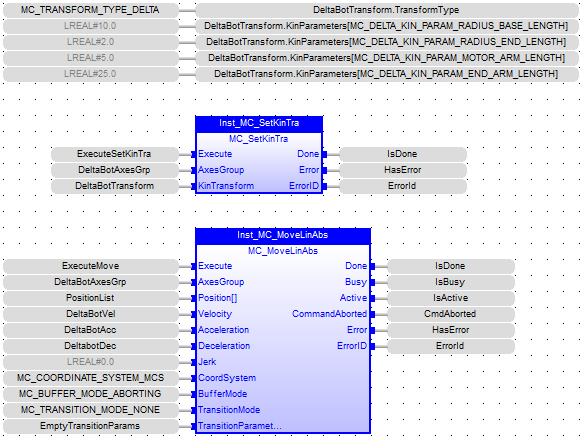
FBD Language Example
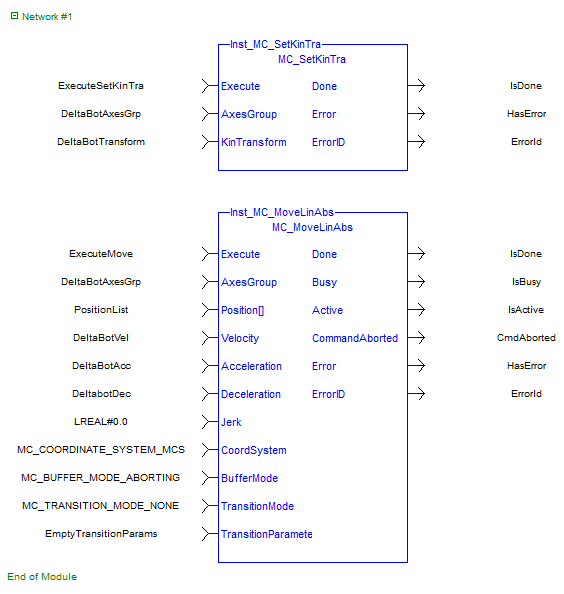
FFLD Language Example
IL Language Example
Not available.
ST Language Example
// MC_SetKinTra ST Example
// DeltaBotTransform is of type MC_KIN_REF
DeltaBotTransform.TransformType := MC_TRANSFORM_TYPE_DELTA; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_RADIUS_BASE_LENGTH] := 10.0; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_RADIUS_END_LENGTH] := 2.0; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_MOTOR_ARM_LENGTH] := 5.0; DeltaBotTransform.KinParameters[MC_DELTA_KIN_PARAM_END_ARM_LENGTH] := 25.0; Inst_MC_SetKinTra(True, DeltaBotAxesGrp, DeltaBotTransform); // ... Inst_MC_MoveLinAbs(True, DeltaBotAxesGrp, PositionList, DeltaBotVel, DeltaBotAcc, DeltaBotDec, LREAL#0.0, MC_COORDINATE_SYSTEM_MCS, MC_BUFFER_MODE_ABORTING, MC_TRANSITION_MODE_NONE, EmptyTransitionParams);






