![]()
 Function
Function![]() A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. - Set the additive torque
A function calculates a result according to the current value of its inputs. A function has no internal data and is not linked to declared instances. - Set the additive torque![]() Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist value to the drive output (torque feed-forward
Torque is the tendency of a force to rotate an object about an axis. Just as a force is a push or a pull, a torque can be thought of as a twist value to the drive output (torque feed-forward![]() This describes an element or pathway within a control system which passes a controlling signal from a source in the control system's external environment, often a command signal from an external operator, to a load elsewhere in its external environment).
This describes an element or pathway within a control system which passes a controlling signal from a source in the control system's external environment, often a command signal from an external operator, to a load elsewhere in its external environment).
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
ID |
DINT |
No range |
N/A |
No default |
Pipe network identifier of the axis block. |
|
LREAL |
No range |
Rated torque units as used in the drive. Example: Rated motor continuous torque X the Torque factor. |
No default |
Requested additive torque value in N.m (Newton meter). |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Default (.Q) |
BOOL |
No range |
N/A |
Returns TRUE when the function successfully executes. See Pipe Network - General Rules for more information. |
Remarks
-
-
This function or function block returns cached data.
See Program a Multi-Core Controller for more information.
- This function is only active after the MLAxisRatedTq function has been invoked.
- Using the PDOs for AKD, AKD2G, AKD-N, S300, or S700, it also requires the IL.KBUSFF value to be set to 1 in the drive.
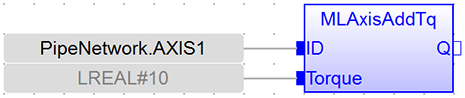
FBD Language Example
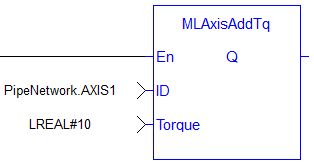
FFLD Language Example
IL Language Example
Not available.
ST Language Example
MLAxisAddTq(PipeNetwork.Axis1, LREAL#10 ) ;
See Also






