Example: PCMM2G Heavily Loaded CPU
This example shows an application that is heavily loading a PCMM2G with the EtherCAT![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Cycle Time = 250 microseconds.
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs Cycle Time = 250 microseconds.
Specifically, this example looks at:
1. MotionExec and PLCProgExec Times
Using the techniques described in Practical Application: Using Trace Time To Measure CPU Load, examine the MotionExec and PLCProgExec times:
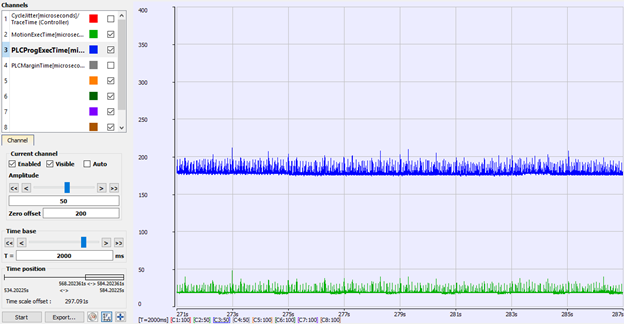
Figure 5-76: MotionExec and PLCProgExec Times
- The average MotionExec = 20 microseconds.
- This is about 8% (20 / 250) of the cycle time.
- The average PLCProgExec = 178 microseconds.
- This is about 71% (178 / 250) of the cycle time.
- Thus, the PLC
 "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events programs have a much higher load.
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events programs have a much higher load.
2. PLCProgExec Peaks
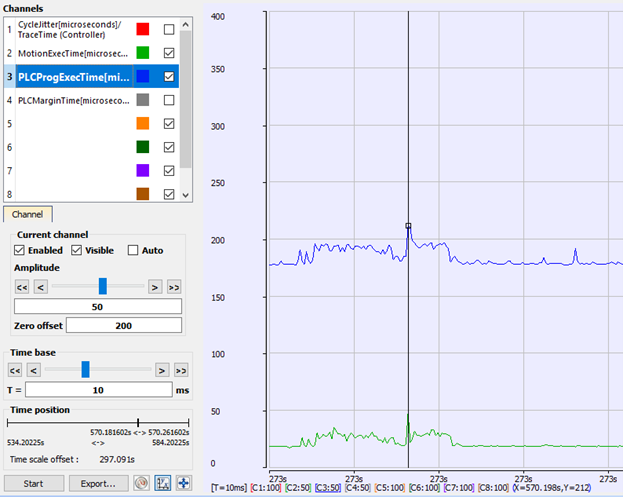
Figure 5-77: PLCProgExec Peaks
This shows there is not much time left over:
- PLCProgExec = 212.
3. PLCMarginTime
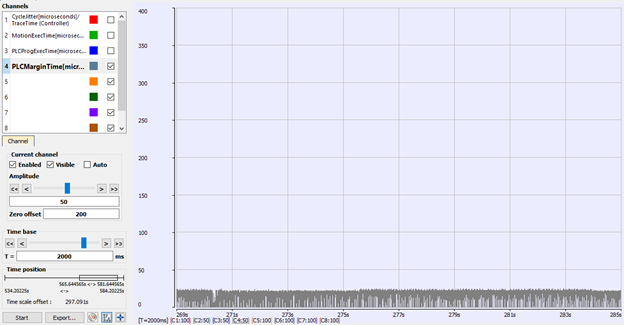
Figure 5-78: PLCMarginTime
- The PLCMarginTime is between 0 and 25 microseconds (0% to 10%).
- This is not a comfortable margin for deterministic PLC performance.
4. Controller Log
The Controller log confirms the occasionally missing PLC execution cycles:
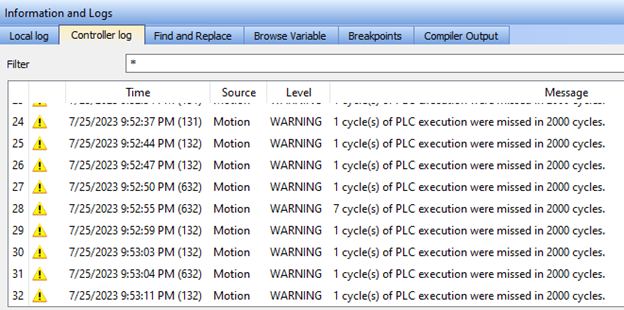
Figure 5-79: Controller Log
See Also






