![]()
![]()
 Function Block - Reads data from an EtherCAT device using CANopen SDO read command.
Function Block - Reads data from an EtherCAT device using CANopen SDO read command.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
Execute |
BOOL |
FALSE, TRUE |
N/A |
No default |
On the rising edge of Execute, an SDO read command is issued.
|
|
Index |
INT |
-32768 to +32767 |
N/A |
No default |
The object directory index of the data to be read. See:
To read/write an SDO object with an index greater than 16#7FFF (32767), the value must be entered in this form: Example: |
|
SubIndex |
SINT |
No range |
N/A |
No default |
The sub-index of the object directory variable to be read. See:
To read/write an SDO object with an index greater than 16#7FFF (32767), the value must be entered in this form: Example: |
|
Size |
UINT |
1 to 255 |
N/A |
No default |
The size (i.e., number of bytes) of the CoE object to read. The size should be the exact size of the CoE object not exceeding 255 bytes. |
|
DeviceAddress |
INT |
-32768 to +32767 |
N/A |
No default |
The EtherCAT address of the device from which data is read from.
|
|
CoEDataArray[] |
USINT |
1 to 255 |
N/A |
No default |
The CoE object data being read. The size of the array should be equal to or greater than the specified size. The data is only set when an SDO read command has successfully completed. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
Done |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function block has completed without error. |
|
Error |
BOOL |
FALSE, TRUE |
N/A |
Indicates whether this function block has completed with error. |
|
ErrorID |
DINT |
No range |
N/A |
The SDO call error result, if Error is TRUE.
|
Remarks
-
-
This function block uses and reserves the EtherCAT SDO Channel.
The SDO Channel remains reserved until the done output is TRUE.
This FB should be called at each cycle until either the Done or Error output is TRUE.
If it is not called at each cycle, the rest of SDO communication (e.g., the AKD GUI Views) is blocked.
Using this FB in SFC P0 or P1 steps is not recommended because these steps are executed only once.
If this FB is used in P0 or P1, then it must be used in an SFC N step to ensure the FB completes.
- Is typically used to query the status of inputs.
- See When can I expect my SDO command to be completed? in the FAQs on how to set up the update rate for SDO communication.
- See EtherCAT Function Blocks that Work with SDOs about function blocks used to work with drive or remote I/O parameters that are not supported by ML and MC function blocks.
State Diagram
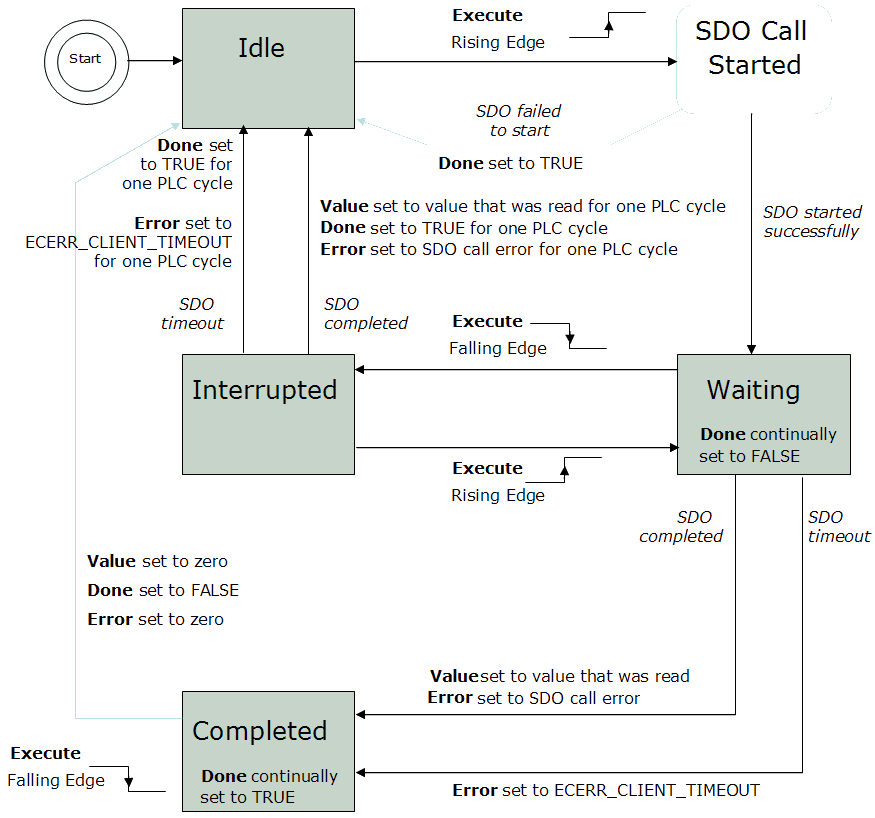
Figure 1: ECATReadSdoData State Diagram
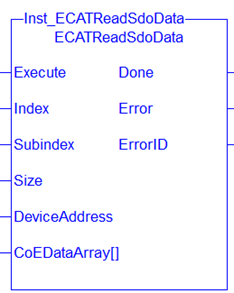
Figure 2: ECATReadSdoData
EtherCAT Error Codes
|
Value Dec (hex) |
Error Code |
Description |
|---|---|---|
|
0 |
ECERR_OK |
The SDO call succeeded. |
|
1000 (0x3E8) |
ECERR_DEVICE_ACTION_IS_INVALID |
The requested Device Action is invalid. |
|
1003 (0x3EB) |
ECERR_DEVICE_ACTION_MINIMUM_ONE_NODE_REQD |
A minimum of one device must be present in the EtherCAT network. |
|
1004 (0x3EC) |
ECERR_DEVICE_ACTION_MINIMUM_ONE_DC_NODE_REQD |
A minimum of one Distributed clock capable device must be present in the EtherCAT network. |
|
107 = 0x6B |
The size of the connections is too small.
|
|
|
1792 (0x700) |
ECERR_DEVICE_ERROR |
EtherCAT device is not accessible. |
|
1794 (0x702) |
ECERR_DEVICE_INVALIDCMD |
Invalid mailbox command. |
|
1795 (0x703) |
ECERR_DEVICE_INVALIDINDEX |
An invalid value for the Index input was specified. |
|
1796 (0x704) |
ECERR_DEVICE_INVALIDACCESS |
Reading of the variable is not permitted. |
|
1797 (0x705) |
ECERR_DEVICE_INVALIDSIZE |
An invalid size for the parameter was specified. |
|
1798 (0x706) |
ECERR_DEVICE_INVALIDDATA |
Invalid parameter value(s) in SDO index and/or sub-index. |
|
1799 (0x707) |
ECERR_DEVICE_NOTREADY |
Device is not in a ready state. The network is not in operational. |
|
1800 (0x708) |
ECERR_DEVICE_BUSY |
Device is not available to respond. |
|
1801 (0x709) |
ECERR_DEVICE_INVALIDCONTEXT |
Device responded with an illegal error code, indicating the command is not allowed under the present conditions. |
|
1802 (0x70A) |
ECERR_DEVICE_NOMEMORY |
EtherCAT mailbox is out of memory or device is out of disk space. |
|
1803 (0x70B) |
ECERR_DEVICE_INVALIDPARM |
EtherCAT mailbox request was not valid. |
|
1804 (0x70C) |
ECERR_DEVICE_NOTFOUND |
EtherCAT device not found. |
|
1805 (0x70D) |
ECERR_DEVICE_SYNTAX |
An unexpected error occurred. |
|
1810 (0x712) |
ECERR_DEVICE_INVALIDSTATE |
The EtherCAT device is in an invalid state. |
|
1817 (0x719) |
ECERR_DEVICE_TIMEOUT |
|
|
1826 (0x722) |
ECERR_DEVICE_INSERTMAILBOX |
Error while inserting the mailbox command into internal FIFO. |
|
1827 (0x723) |
ECERR_DEVICE_INVALIDOFFSET |
An invalid value for the SubIndex input was specified. |
|
1828 (0x724) |
ECERR_DEVICE_UNKNOWNMAILBOXCMD |
The master sent an unknown mailbox command to the slave. |
|
1829 (0x725) |
ECERR_DEVICE_ACCESSDENIED |
Device responded with an invalid access error code, indicating the command is not allowed. |
|
1832 (0x728) |
ECERR_DEVICE_INVALIDADDR |
The specified EtherCAT node address is invalid. |
|
1836 (0x72c) |
ECERR_DEVICE_NOT_A_FSOE_MASTER |
Device is not a FSoE master. |
|
1837 (0x072D) |
ECERR_DEVICE_DISCONNECTED |
The EtherCAT device is disconnected. |
|
1920 (0x780) |
ECERR_DEVICE_PARAM_ACCESS_ERROR |
Unknown error occurred while accessing parameter. |
|
1921 (0x781) |
ECERR_DEVICE_PARAM_NOT_FOUND |
Parameter was not found. |
|
1922 (0x782) |
ECERR_DEVICE_PARAM_NOT_INTEGER |
Parameter is a floating-point value. Integer value required. |
|
1923 (0x783) |
ECERR_DEVICE_VALUE_IS_NEGATIVE |
No negative values allowed. Value specified was negative. |
|
1924 (0x784) |
ECERR_DEVICE_VALUE_OUT_OF_RANGE |
Value is out of data-range. |
|
1925 (0x785) |
ECERR_DEVICE_VALUE_GREATER_THAN_MAX |
Value bigger than maximum. |
|
1926 (0x786) |
ECERR_DEVICE_VALUE_LOWER_THAN_MIN |
Value lower than minimum. |
|
2048 (0x800) |
ECERR_CLIENT_ERROR |
Error in Mailbox response to a previously sent mailbox command. |
|
2049 (0x801) |
ECERR_CLIENT_TIMEOUT |
The SDO command timed out. |
|
2050 (0x802) |
ECERR_CLIENT_ INVALIDPARM |
An invalid value was specified. |
|
2051 (0x803) |
ECERR_CLIENT_ INVALIDSIZE |
An invalid value for the size input was specified. |
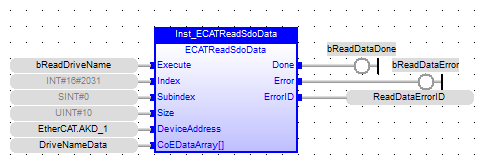
FBD Language Example
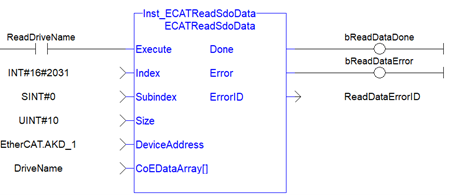
FFLD Language Example
IL Language Example
Not available.
ST Language Example
(* Read DRV.NAME on first AKD Drive on EtherCAT network *)
Inst_ECATReadSdoData(TRUE, 16#2031, 0, 10, EtherCAT.AKD_1, DriveName );
IF Inst_ECATReadSdoData.Done OR Inst_ECATReadSdoData.Error THEN Inst_ECATReadSdoData(FALSE, 16#2031, 0, 10, EtherCAT.AKD_1, DriveName );
END_IF;
See Also






