Blending Between Moves
Some Coordinated Motion function blocks have a BufferMode input parameter.
Buffer modes include:
- BM_ABORTING = 0 = Aborting
- BM_BUFFERED = 1 = Buffered
- BM_BLENDING_PREVIOUS = 2 = Blending Previous
- BM_BLENDING_NEXT = 3 = Blending Next
- BM_BLENDING_LOW = 4 = Blending Low
- BM_BLENDING_HIGH = 5 = Blending High
When the current and next motion function blocks are blended (2 through 5), the axes group does not stop between motions.
- The velocity is blended according to the specified blending mode.
- The function block's TransitionMode parameter can be set to provide a smooth circular arc between moves.
- See Transition Between Moves.
|
Buffer Mode |
Profile |
Description |
|---|---|---|
|
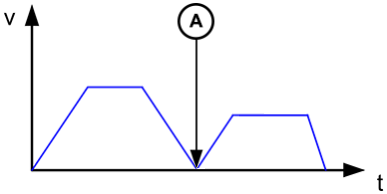
BM_ABORTING |
|
In the image, the second function block starts execution at Point A.
|
|
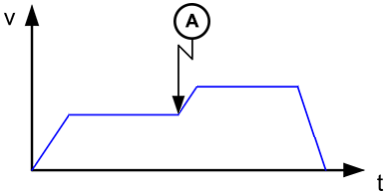
BM_BLENDING_HIGH |
|
In the image, the second function block starts execution at Point A. The velocity is blended to the highest velocity of the two moves.
|
|
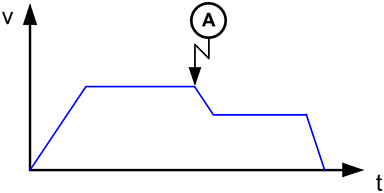
BM_BLENDING_LOW |
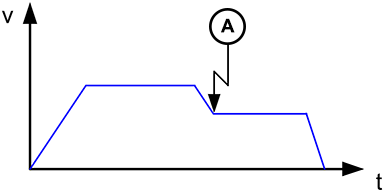
|
In the image, the second function block starts execution at Point A. The velocity is blended to the lowest velocity of the two moves.
|
|
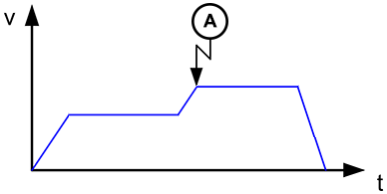
BM_BLENDING_NEXT |
|
In the image, the second function block starts execution at Point A. The current move begins to accelerate or decelerate so that it reaches the next move's programmed velocity at the time the current move reaches its endpoint. |
|
BM_BLENDING_PREVIOUS |
|
In the image, the second function block starts execution at Point A.
|
|
BM_BUFFERED |
|
In the image, the second function block starts execution at Point A.
|