Motion Profile
In motion control, a common need is to move a system from one steady position to another (point-to-point motion).
Following the fastest possible motion within an allowed maximum value for speed, acceleration, and jerk, results in a third-order motion profile as shown in this image:
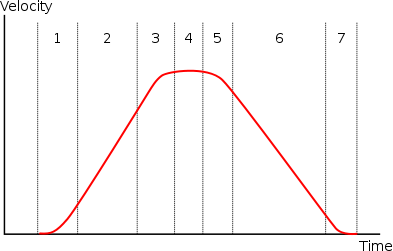
Figure 1: Third-order motion profile
The motion profile consists of a maximum of seven phases defined by:
- Acceleration increase with maximum positive jerk.
- Constant maximum acceleration (zero jerk).
- Acceleration decrease, approaching the desired maximum velocity with maximum negative jerk.
- Constant maximum speed (zero jerk, zero acceleration).
- Deceleration increase, approaching the desired deceleration with maximum negative jerk.
- Constant maximum deceleration (zero jerk).
- Deceleration decrease, approaching the desired position at zero velocity with maximum positive jerk.
If the initial and final positions are sufficiently close together, the maximum acceleration or maximum velocity may never be reached.






