Axis Parameters
See:
Update Rate Types
Controller
The update rate depends on KAS application program update rate.
See Define the PLC Cycle.
EtherCAT Cyclic
The update rate depends on the EtherCAT.
See these topics about update rates:
EtherCAT Non-Cyclic
The update rate depends on the reading of the parameter through EtherCAT.
Static
The Values do not change after the axis is created.
User Units to Feedback Units Ratio
Parameters Non-Boolean Parameters and Non-Boolean Parameters are set during the MC_CreatePLCAxis function block execution.
- These two parameters work together to form the User Units to Feedback Units Ratio (UU/FBU Ratio).
- The drive interface units are fixed by the drive and define the drive units per revolution.
- This is used to command the drive per the ratio.
Example 1
Where the drive interface units are set to 1048576 units per revolution, the value of the UU-per-revolution ratio is calculated as:
UU per revolution = MC_AXIS_PARAM_UU_FB_RATIO_NUM * 1048576 / MC_AXIS_PARAM_UU_FB_RATIO_DEN
Example 2
A Drive with a Ratio of:
Generates
Revolution of Drive Motor
Generates
UU-to-FBU Ration
360 UU / 1048576 FBU
360 UU
0.000343323
11379 UU / 1898996404 FBU
6.283185 UU
5.99211e-6
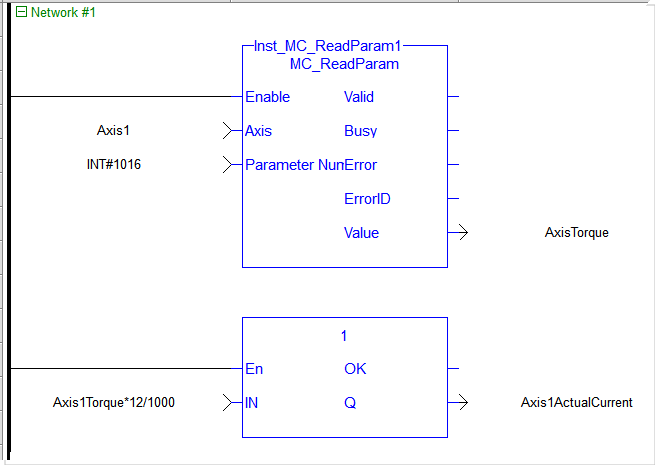
Example 3 - Reading the Current to Units of Amps
After reading the current using MC_ReadParam, this equation converts current to amps for a 12 amp peak drive:
MC_AXIS_PARAM_TORQUE_ACTUAL * Drive Continuous Current Rating / 1000