![]()
 Function Block -
Returns the fault status, number, and description of the requested axis mapped to a Kollmorgen drive.
Function Block -
Returns the fault status, number, and description of the requested axis mapped to a Kollmorgen drive.
Inputs
|
Input |
Data Type |
Range |
Unit |
Default |
Description |
|---|---|---|---|---|---|
|
EN |
BOOL |
0 to 1
|
N/A |
No default |
Enables the KollmorgenUDFB. Used in the FFLD editor only. |
|
AxisID |
DINT |
-2147483648 to 2147483647 |
N/A |
No default |
ID of the axis block of the Pipe Network. |
Outputs
|
Output |
Data Type |
Range |
Unit |
Description |
|---|---|---|---|---|
|
FAULT |
BOOL |
0 to 1
|
N/A |
TRUE if the selected drive currently has a Fault. |
|
FaultNumber |
DINT |
No range |
N/A |
If the axis is:
|
|
FaultDescription |
STRING |
N/A |
N/A |
Description of the fault. |
Bitmask Causes
|
Bit |
Description |
Cause |
|---|---|---|
|
0 |
Saturated |
Drive stage operates with maximum duty cycle. |
|
1 |
Over temperature. |
Internal temperature is higher than 80 °C. |
|
2 |
Torque overload. |
Motor current is higher than the rated current. |
|
3 |
Under voltage. |
Motor supply voltage is either:
|
|
4 |
Over voltage. |
Motor supply voltage is 10% higher than the configured nominal voltage. |
|
5 |
Short circuit A. |
Short circuit in motor coil A. |
|
6 |
Short circuit B. |
Short circuit in motor coil B. |
|
7 |
No control power. |
Control voltage at the power contacts is less than 12V. |
|
8 |
Misc. error. |
Either:
|
|
9 |
Configuration error. |
CoE change has not yet been adopted into the current configuration. |
Remarks
-
- This function block requires FB_S700FltRpt, MCFB_AKDFault, and MCFB_AKDFaultLookup subprograms imported to project to compile and function.
- The FAULT output returns TRUE when the selected drive goes into a fault state.
- The fault number and description depend on the drive type mapped to the axis.
- If the drive is an:
- AKD or AKD2G, the fault number is the same number as reported on the display of the drive.
- AKT2G Stepper, the fault number represents the drive status word.
- This word is a bitmask that represents the various error conditions.
- If the drive is an:
This image shows the function or function block I/O.
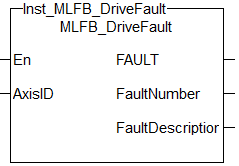
Figure 1: MCFB_DriveFault
Usage
- Provide drive fault information the application program uses to determine next steps.
- Example: Perform a machine-controlled stop or perform an immediate disable of the servo drives.
- In the application program, sends output fault information from this UDFB to the HMI for review by the machine operator.
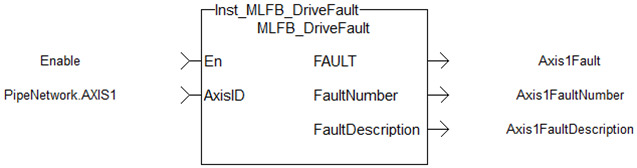
FBD Language Example

FFLD Language Example
IL Language Example
Not available.
ST Language Example
//Execute and Read the Function Block
Inst_MLFB_DriveFault(PipeNetwork.AXIS1);
Axis1Fault := Inst_MLFB_DriveFault.FAULT;
Axis1FaultNumber := Inst_MLFB_DriveFault.FaultNumber;
Axis1FaultDescription := Inst_MLFB_DriveFault.FaultDescription;
See Also






